

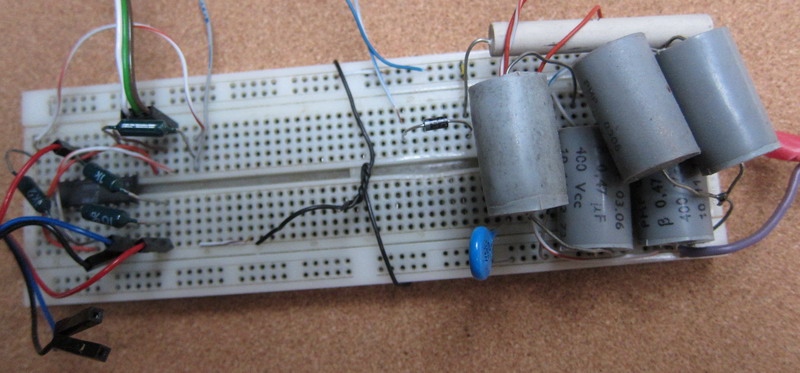
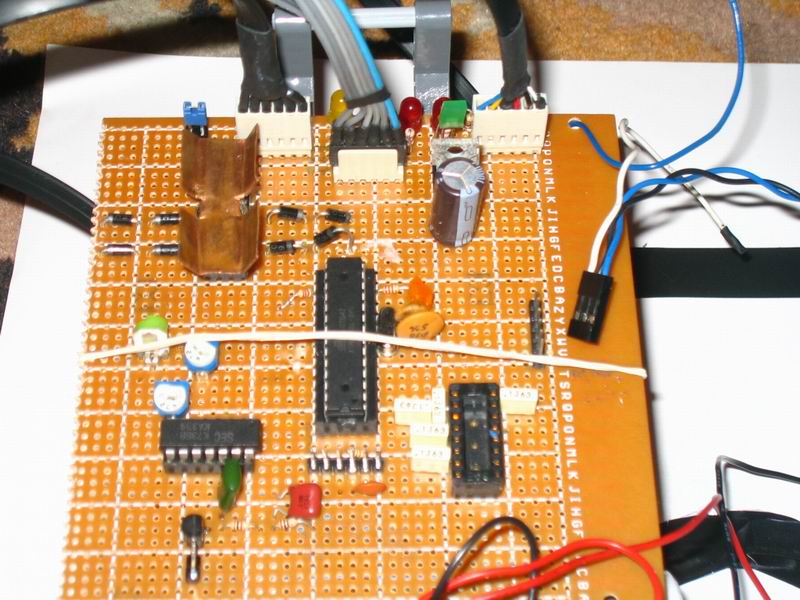
Emițător SSB QRP în modurile WSPR și JT65A, în banda de 80m, 2017, absolvent Cezar Vener YO3FHM (master)
A fost realizat un emițător de mică putere în banda de 3.5MHz, SSB (BLU prin filtrare) pentru testarea unor moduri de transmisie cu bandă ocupată foarte mică (WSPR: 6Hz!!!, JT65A: 177.6Hz). Au fost proiectate plăcile analogice și digitale, ultimele folosind două uC PIC (inclusiv bloc de sinteză DDS și afișaj).
Controller de repetor 2017, absolvent Cristian Mitroi YO3GWM (master)



A fost realizat un controller de repetor cu microprocesor PIC care este folosit pentru repetoarele de radioamatori YO9C și (experimental) RoLink-YO3KXL.
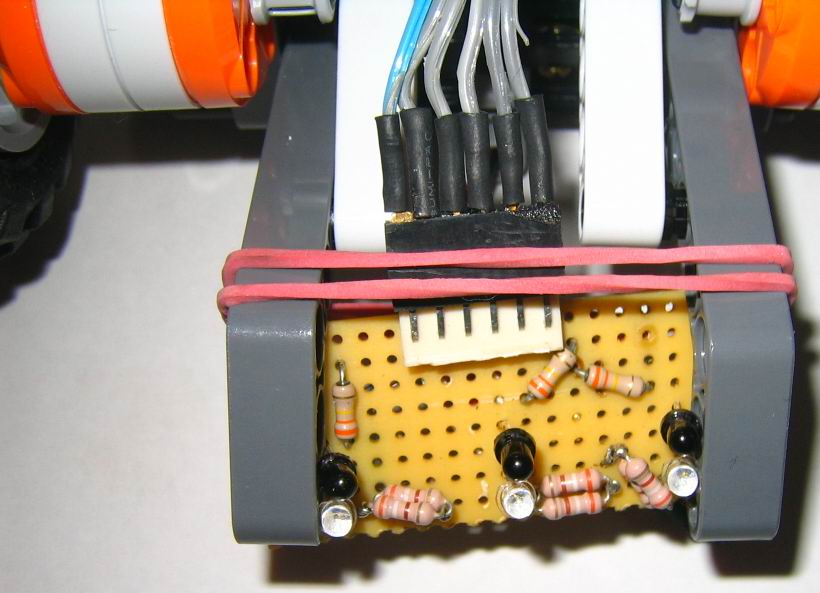
Robot pentru rezolvarea și maparea unui labirint 2017, absolvent Vlad-Andrei Rădoiu
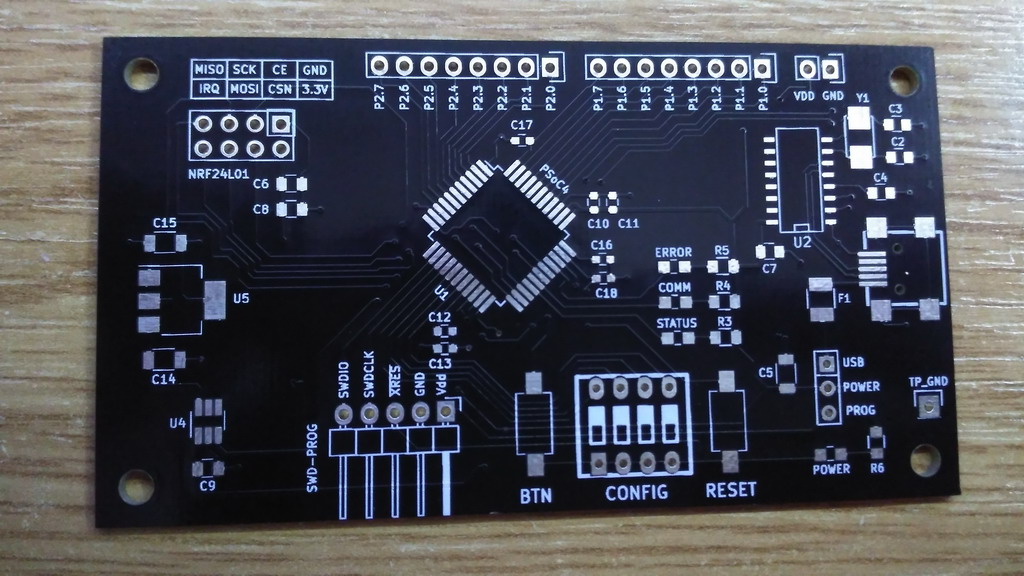
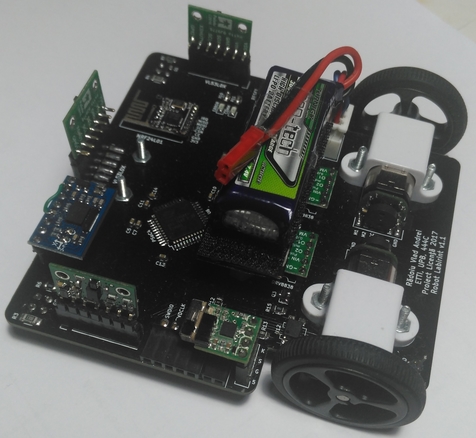
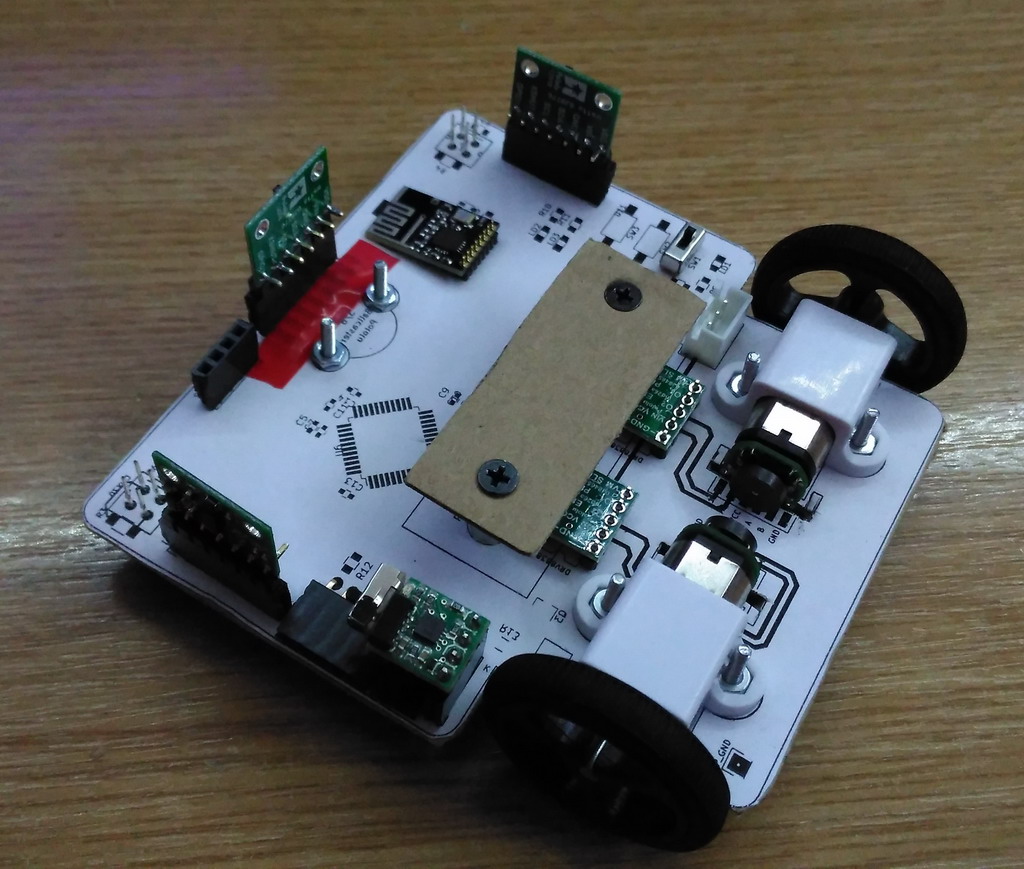
Robotul este realizat cu procesor ARM PSoc4 (Cypress), urmărește traseul printr-un labirint, îl mapează în scopul rezolvării optime, și trimite telemetrie la PC cu harta labirintului, folosind un modul NRF24L01.
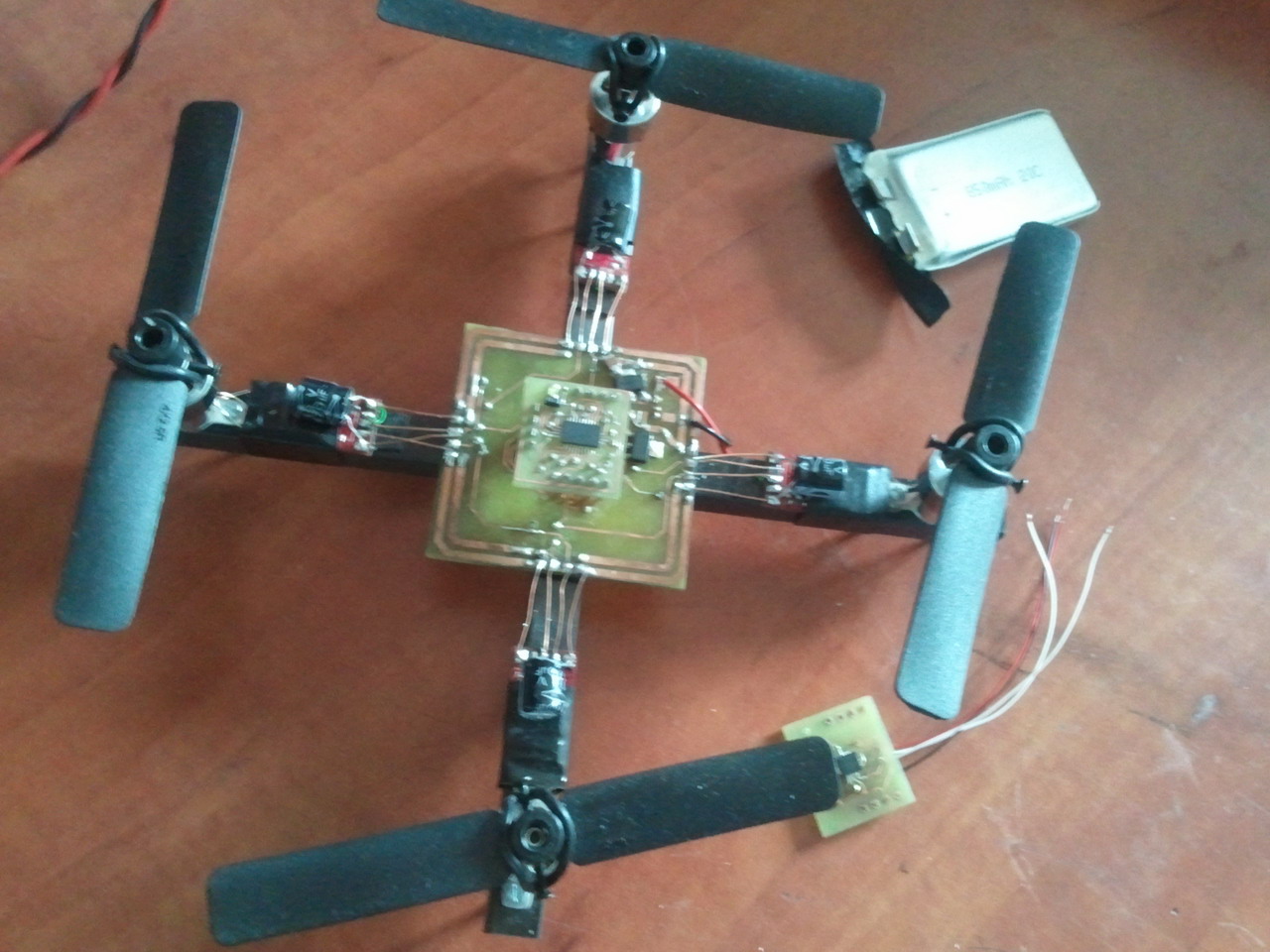
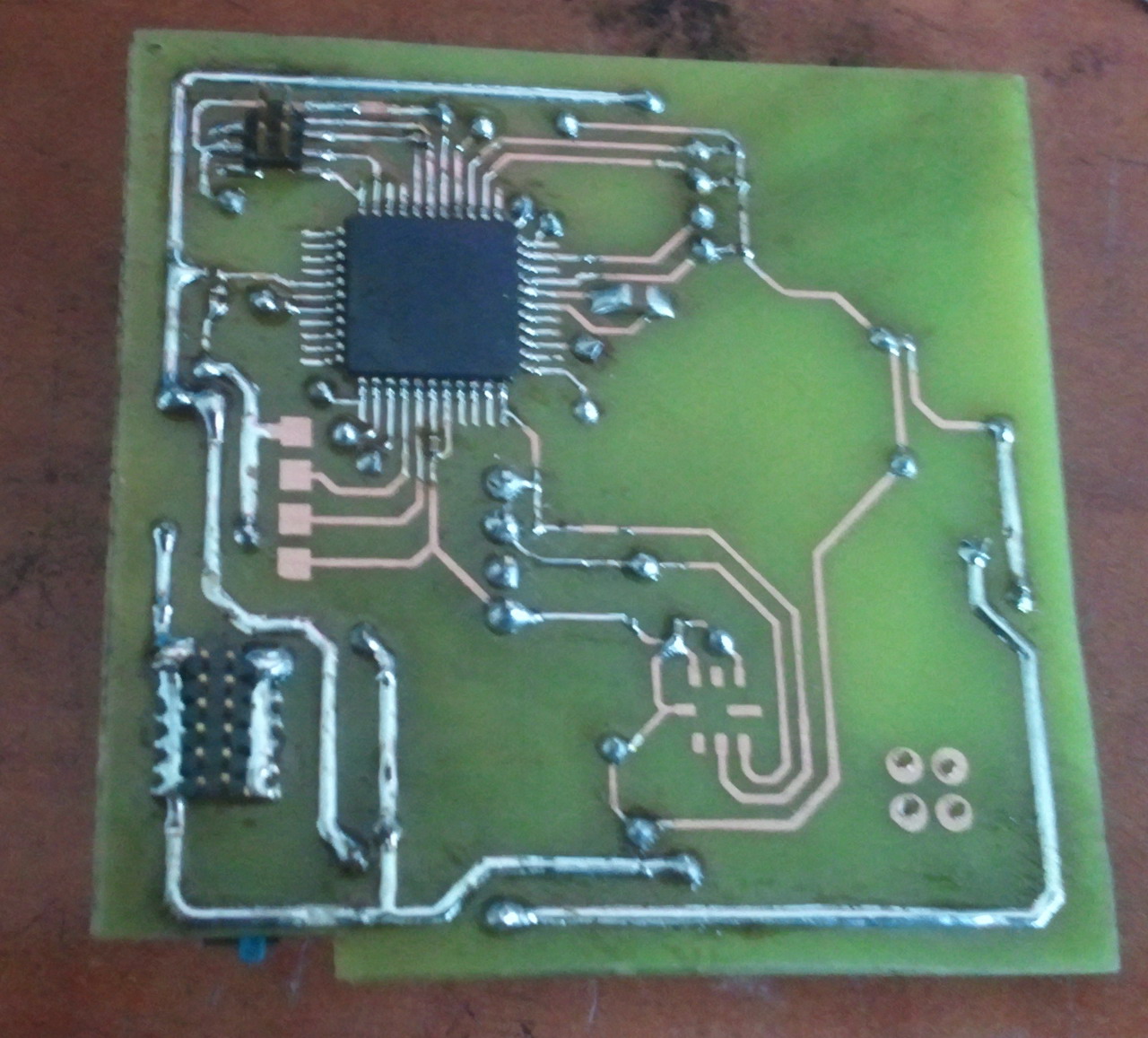
Dronă 2016, absolvent Marius Mădălin Scrieciu

A fost realizată o dronă (quadcopter) cu procesor AT Mega 328 și o telecomandă cu transmisie prin NRF24L01.
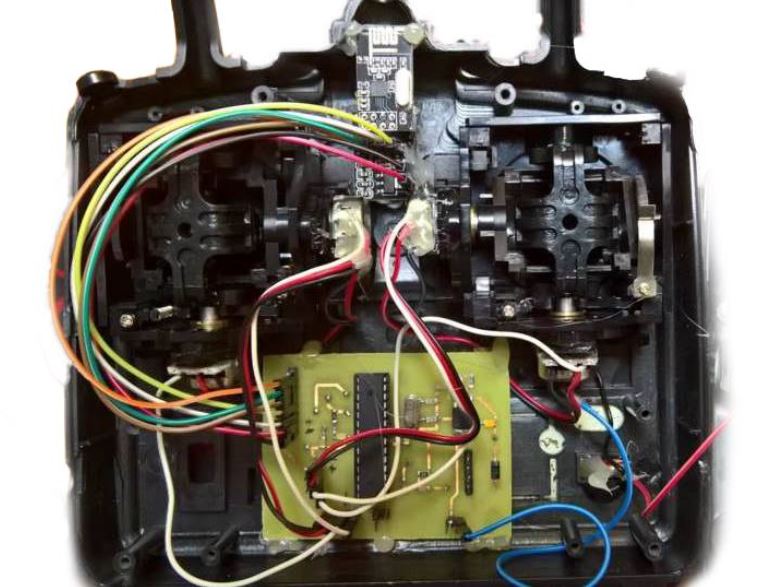
Robot căutător de "obiecte" colorate și care evită obstacolele, 2016, absolvent Bianca Vlad Elis
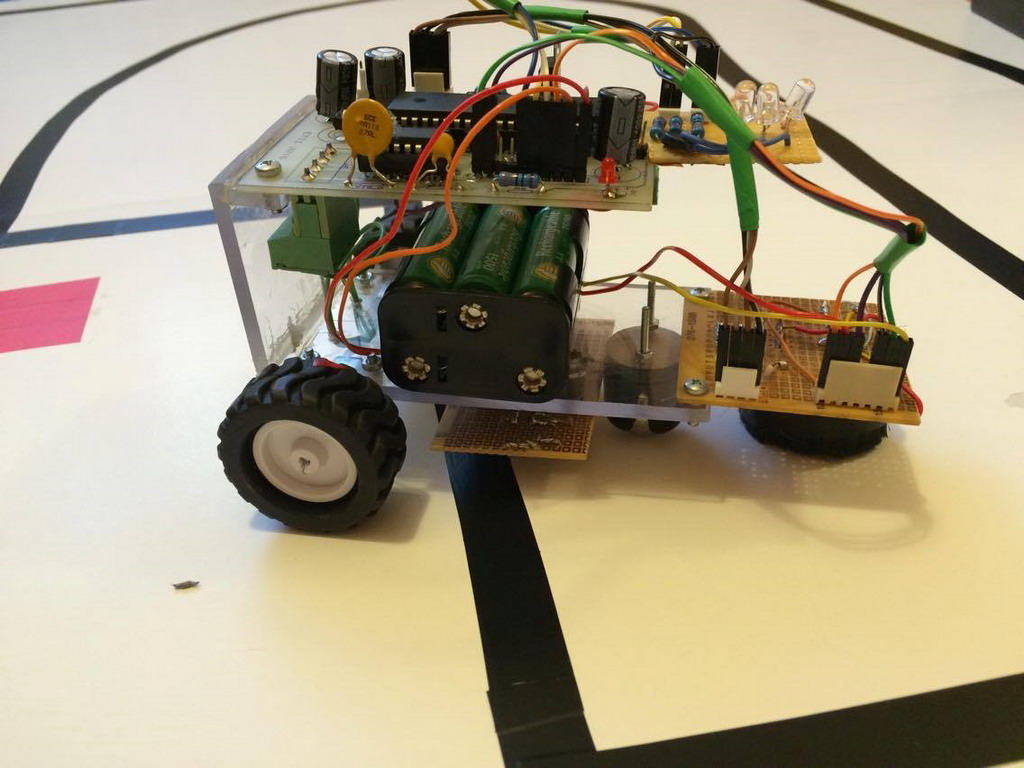
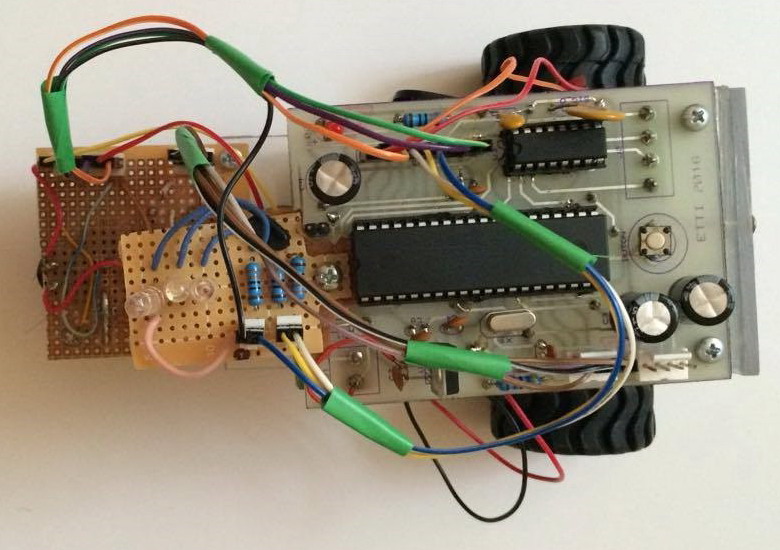
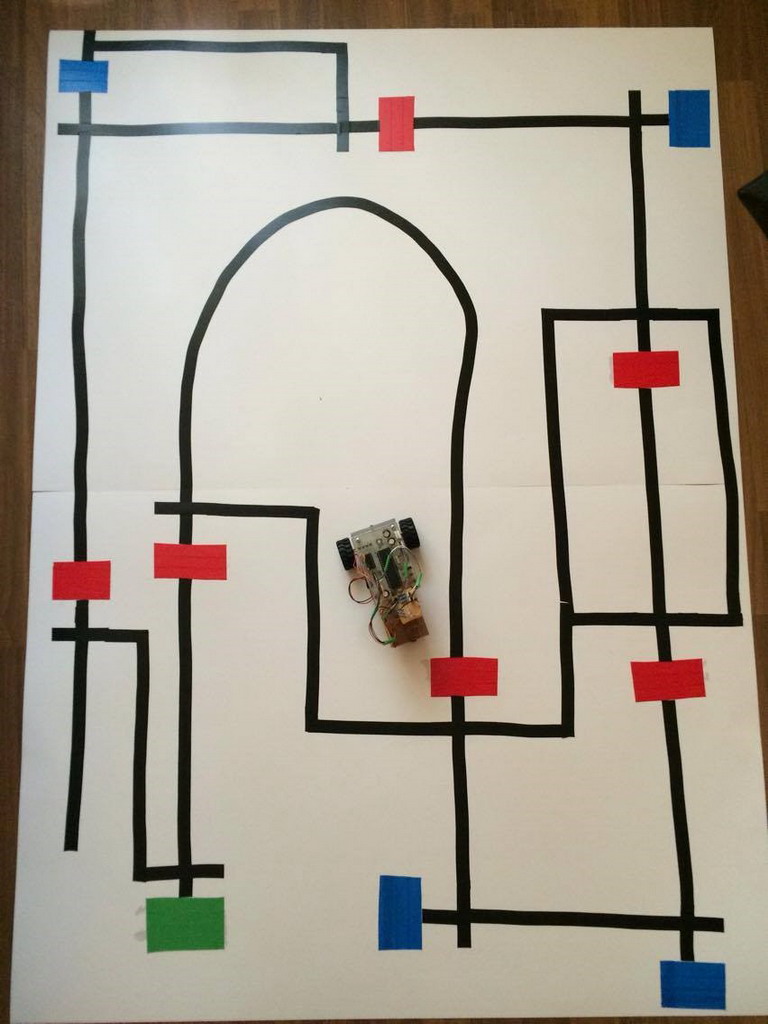
Robotul este realizat cu procesor AT Mega 16, găsește marcaje colorate și evită obstacolele figurate cu bandă neagră.
Robotul "Jasper" semi-autonom și cu comandă vocală 2016, absolvent Ana-Maria Gallan


Robotul este construit în jurul unui Raspberry Pi pe care rulează software de recunoaștere de cuvinte, existînd și o placă de control care comandă motoarele și citește senzorii.
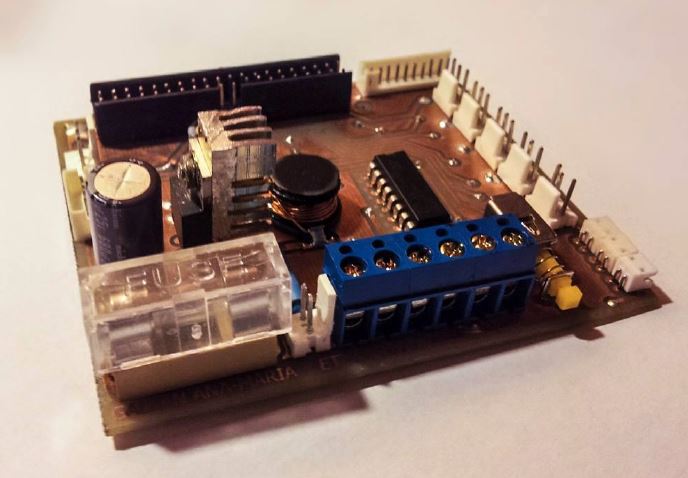
Sistem de localizare şi transmitere a datelor în caz de accident, 2015, absolvent Dan Gheorghiţă (master)
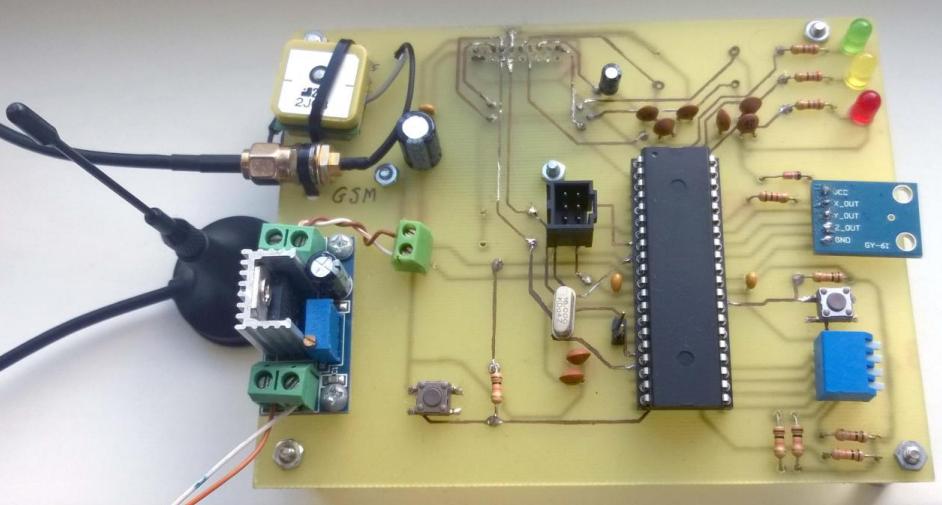

S-a construit un circuit bazat pe un modul GSM/GPRS, accelerometru şi procesor AVR care achiziţionează coordonatele şi în cazul detecţiei unui accident, le transmite prin GSM/GPRS către un server. Aplicaţia de pe server afişează harta cu coordonatele actuale. S-a investigat folosirea GPS şi AGPS.
Robot autonom cu navigare folosind o cameră video, 2015, absolvent Cristian Clepcea
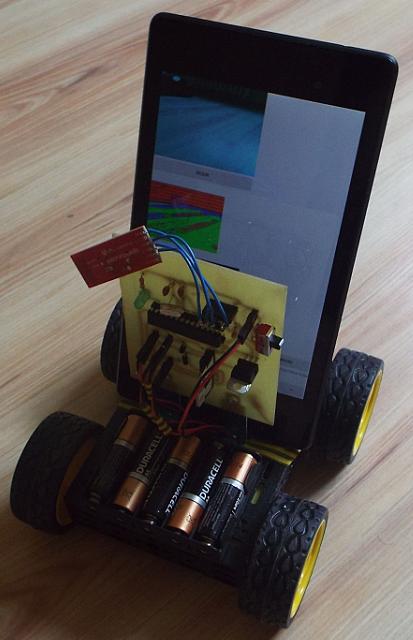

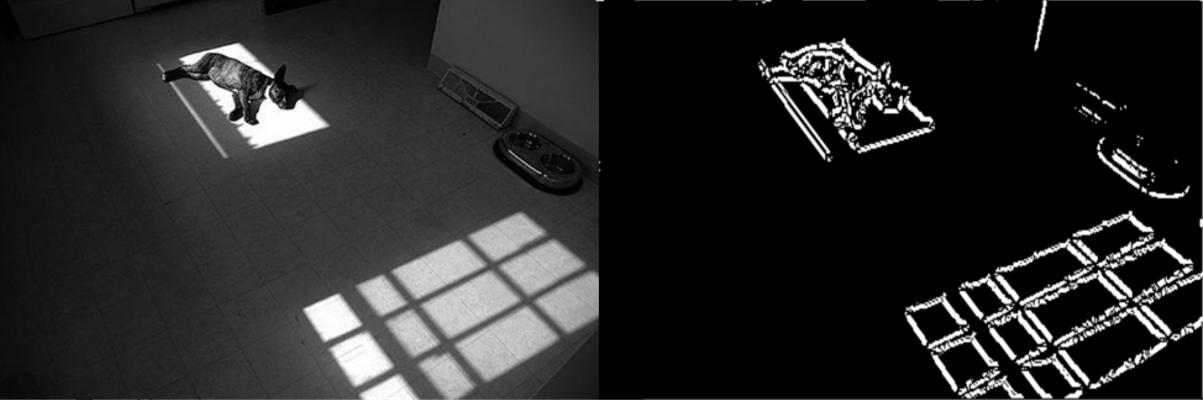
Robotul foloseşte camera şi procesorul de pe o tabletă, care comunică prin Bluetooth cu placa cu uP Atmel care comandă motoarele. S-au analizat, implementat şi testat diverşi algoritmi de procesare a imaginilor a.î. să se extragă cît mai fiabil contururile obstacolelor în vederea evitării acestora.
Dronă de tip quadcopter 2014, absolvent Ionuţ Cîrjan

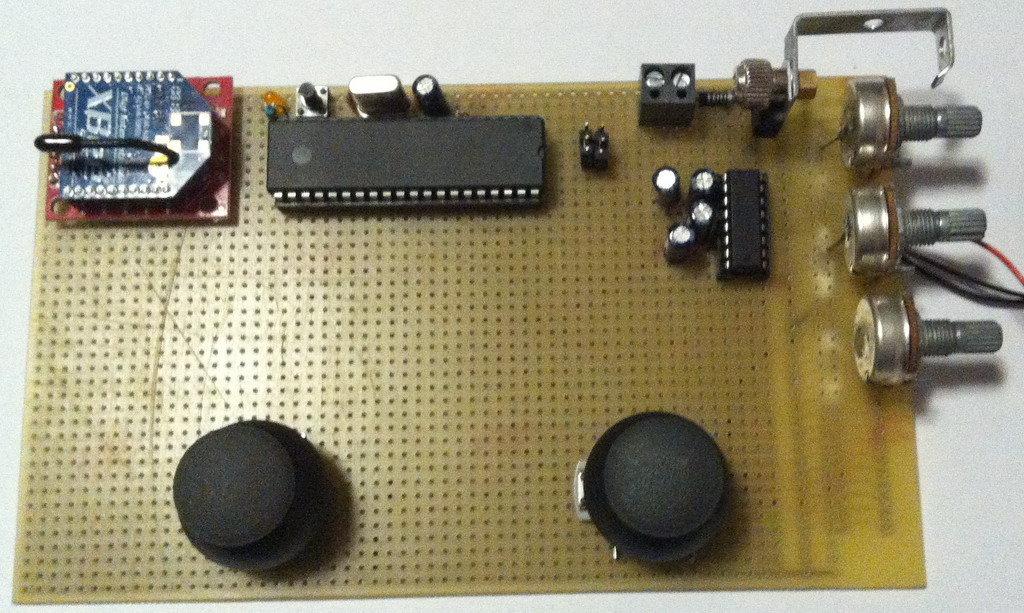
Drona este echipată cu procesor At Mega 128 şi diverşi senzori pentru determinarea poziţiei şi orientării. A fost construită şi o telecomandă, folosind module XBee.
Echipă de roboţi autonomi, 2014, absolvent Codruţ Piele


Au fost construiţi un număr de roboţi autonomi modulari, capabili să comunice
între ei şi să colaboreze pentru îndeplinirea unei sarcini în comun.
Roboţii sînt echipaţi cu procesor ATMega328, modul laser pentru aliniere,
senzor de distanţă Sharp şi modul de comunicaţie Bluetooth. Roboţii pot
fi controlaţi printr-o aplicaţie Android care rulează pe un telefon.
Sistem de acces distribuit cu dispozitive iButton pentru corpurile A+B, local Leu, 2013, absolvent Dragoş Ionuţ Galalae


Sistemul a fost proiectat si construit pentru a permite accesul in laboratoare
folosind pastile iButton in locul cheilor/cardurilor de acces. Este compus din
controloare de usa cu uC Atmel AVR (un controlor are in subordine cititoarele/electromagnetii
de la maxim 7 usi), repetoare active si pasive pentru reteaua RS485, care
astfel se poate intinde pe toate etajele localului Leu, tastaturi (optionale),
convertor izolat galvanic
USB-RS485 si adaptor USB-one wire pentru managementul pastilelor.
Sistemul a fost deja montat in laboratorul pentru
proiect2/3 si proiecte de diploma si e in curs de extindere la alte laboratoare.
Pentru acces exista o baza de date MySQL si o aplicatie specifica sub linux, care
comunica prin RS485 cu controloarele. Acestea tin in memoria locala baza
de date, astfel incit sistemul continua sa functioneze chiar daca se pierde
legatura cu serverul linux.
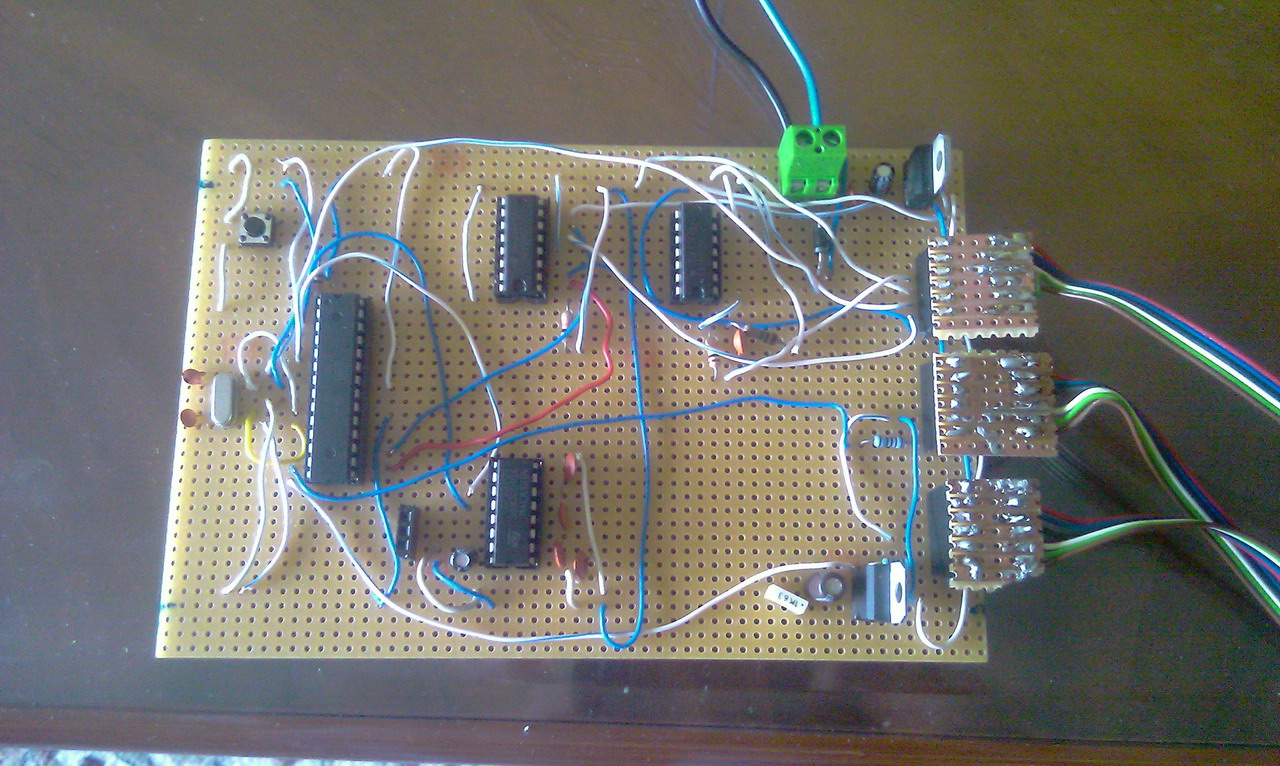
Sistem de comanda prin reteaua de 220V, 2013, absolvent Mihai Gaita

A fost construit un sistem care sa permita comanda la distanta, pe baza protocolului X10, a unor consumatori de putere, fara alta retea de comunicatie decit linia de alimentare de 220V. Sistemul este compus dintr-un "master" (care are o interfata cu linia electrica si una cu PC-ul) si un numar de "slaves", avind interfata doar cu linia electrica, fiecare cu adresa configurabila individual si cu un numar de canale cu triac. Este posibila comanda de tip on/off dar si de tip "dimmer" a oricarui consumator, in mod independent. Protocolul X10 functioneaza prin transmiterea unor impulsuri la momentele de trecere prin 0 ale liniei electrice.
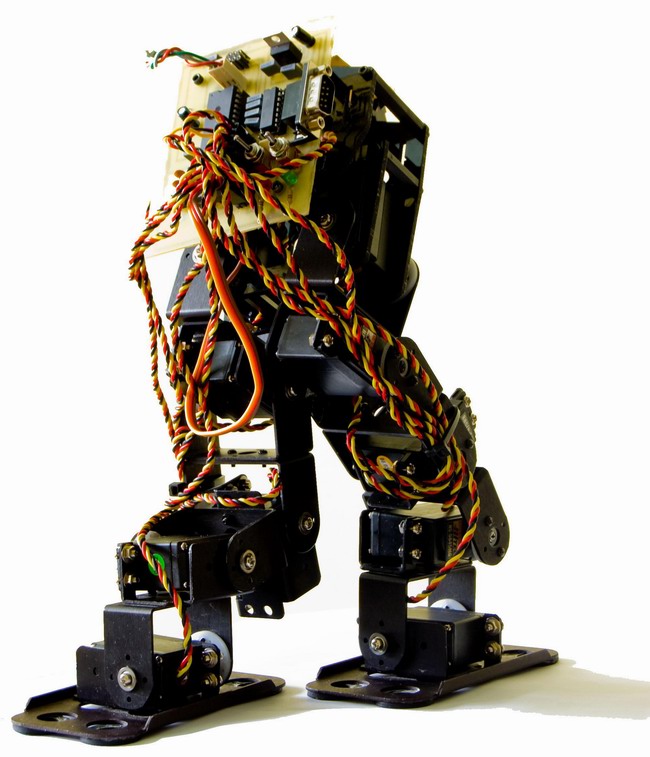
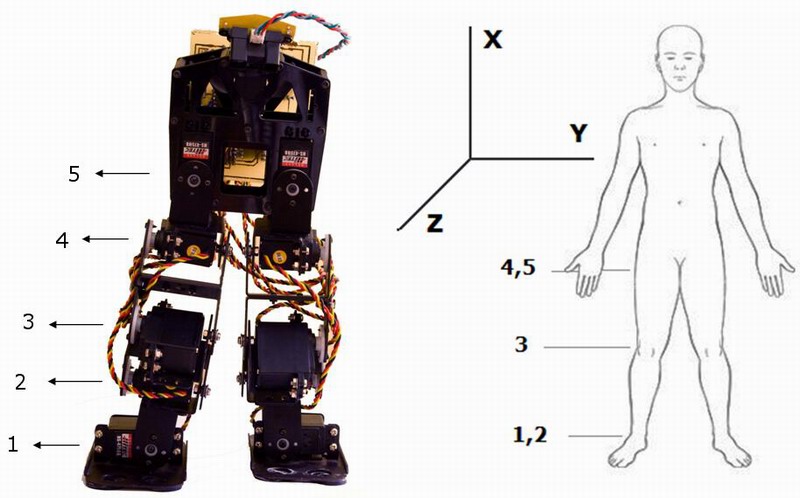
Robotul biped XILAS 2013, absolvent George Stelian Muscalu
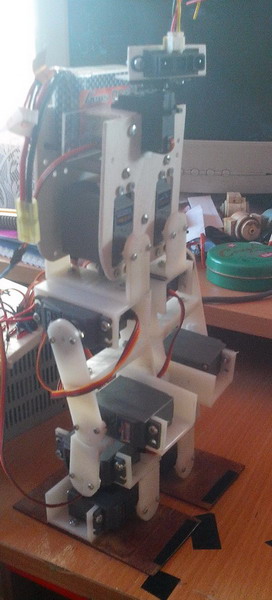
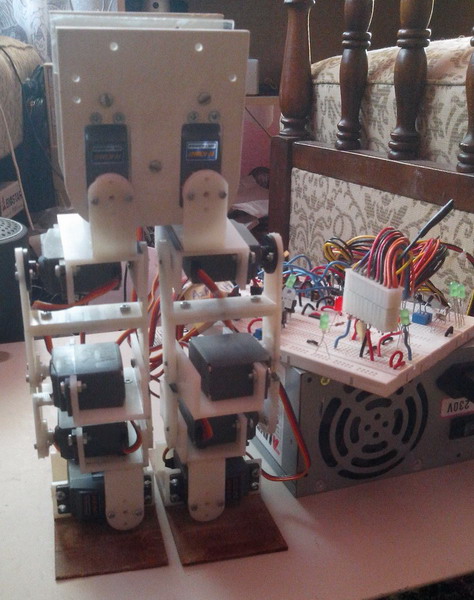
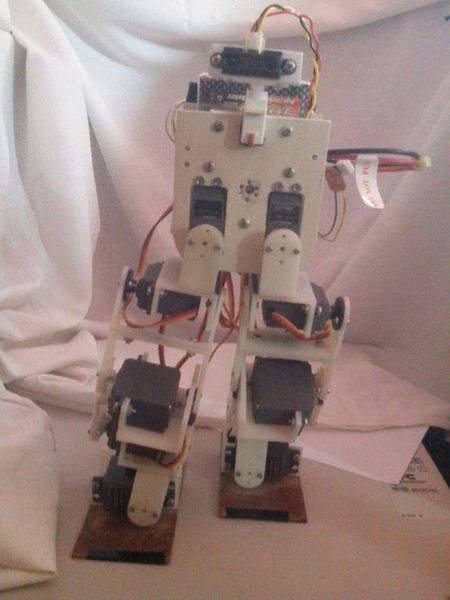
Robotul este construit pe baza unor servomotoare instalate in locul articulatiilor si comandate de un uC Atmel AVR. Algoritmul de comanda permite efectuarea de pasi si evitarea obstacolelor, detectate cu ajutorul unui senzor ultrasonic.
Robot autonom care evita obstacolele 2013, absolvent George-Alexandru Tapardea

Robotul este capabil sa urmareasca un traseu dat si sa evite obstacolele de pe traseu. Se foloseste un uC Atmel AVR, motoare de c.c. cu control PWM, senzori optici si ultrasonici.
Robot zburator de tip quadcopter 2012, absolvent Cătălin Ţibuleac


A fost construit un robot zburator telecomandat folosind 4 rotoare, o placa cu microcontroller si drivere de motoare, si carcasa unei telecomenzi de la o jucarie (pentru care s-a dezvoltat o placa separata cu microcontroller si afisaj). Se folosesc ca senzori un accelerometru pe 3 axe, un magnetometru, un giroscop si un barometru, atit pentru telemetrie, cit mai ales pentru asigurarea stabilitatii in zbor.
Robot cu orientare in labirint 2012, absolventa Ana Cărăvan

Robotul este destinat sa gaseasca iesirea dintr-un labirint desenat pe jos folosind banda neagra. Se foloseste un microcontroller AVR. In plus, robotul evita obstacolele si comunica prin Bluetooth cu un PC.
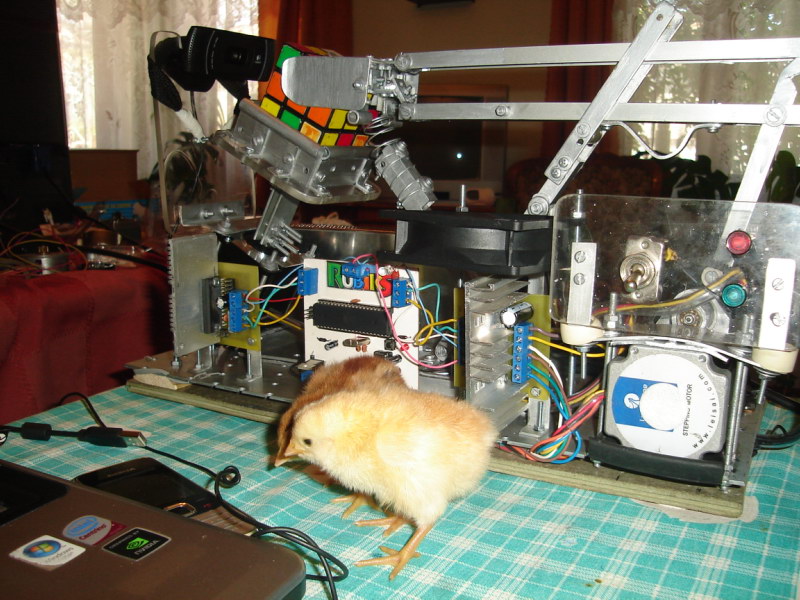
Robot Rubik 2012, absolvent Bogdan Micluţ
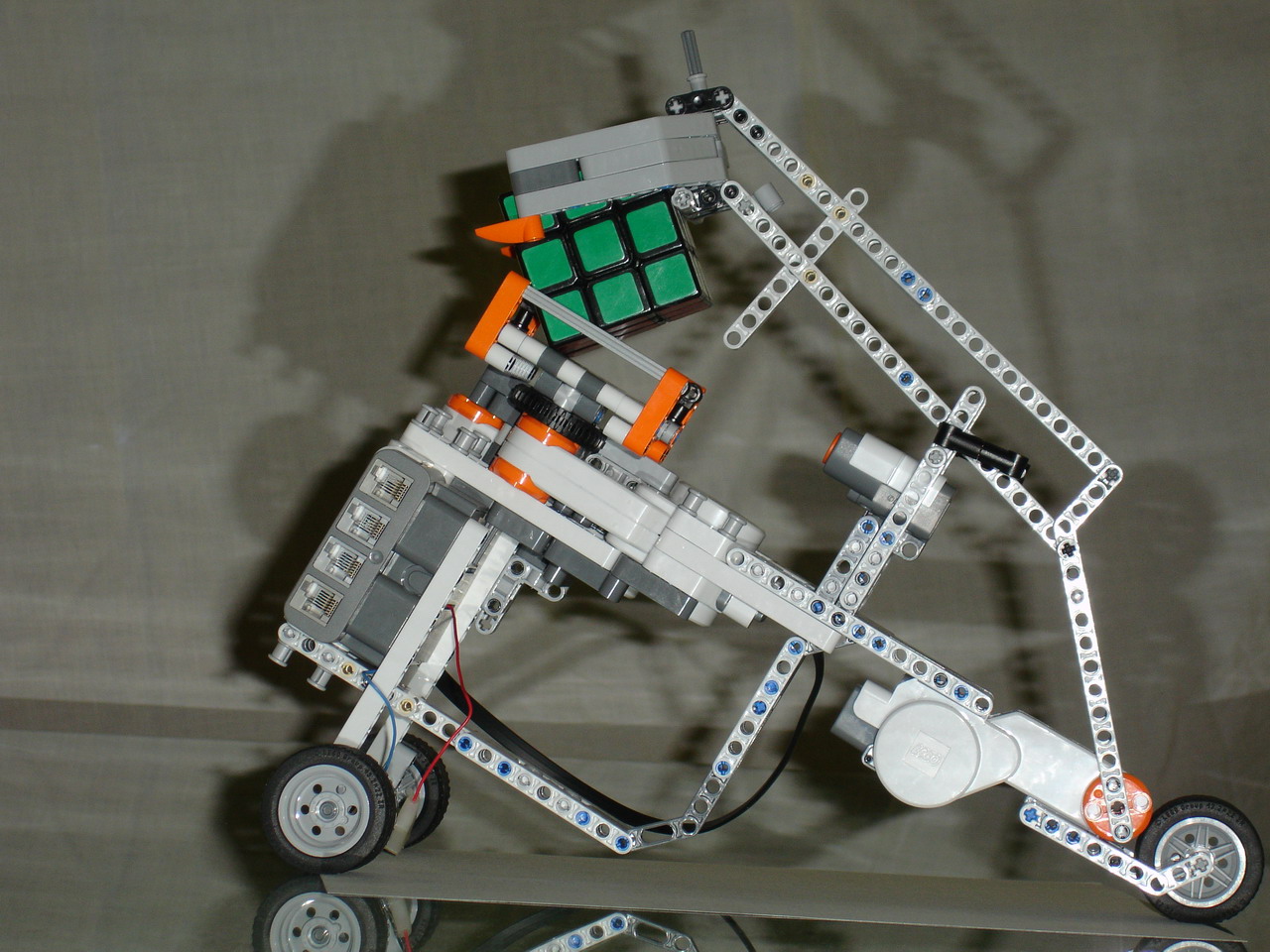

Robotul rezolva cubul Rubik. Partea mecanica este realizata folosind piese ditr-un kit Lego Mindstorms NXT. Motoarele sint conectate la brick-ul NXT care este comandat de o placa cu microcontroller Atmel, care la rindul sau primeste comenzi de la un PC. La PC este conectat un webcam si algoritmul de rezolvare foloseste imaginea cubului obtinuta de aceasta camera.
Masina de gaurit cu comanda numerica 2012, absolvent Marius Stanila

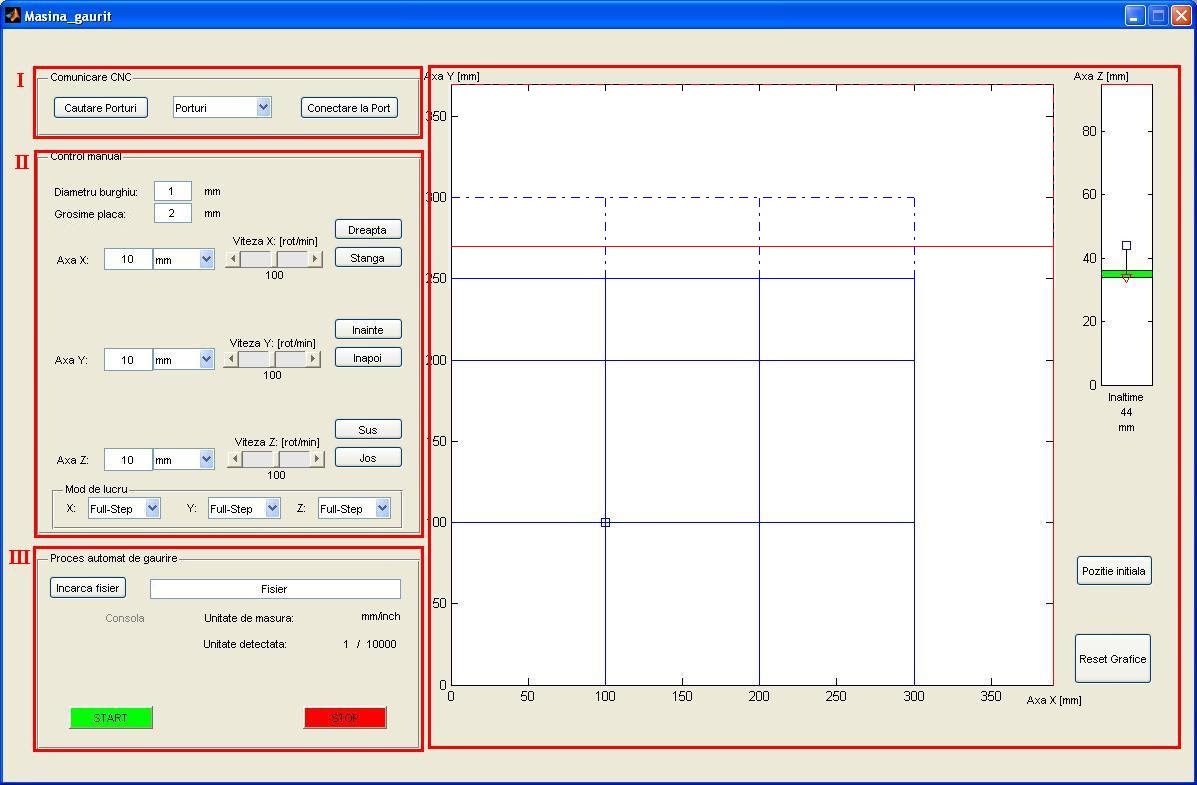
A fost realizata o masina de gaurit in coordonate, cu comanda numerica, care comunica cu un PC si preia de la acesta instructiunile de gaurire prin citirea fisierelor in format Gerber. Masina este prevazuta cu un procesor Atmel si asigura o pozitonare precisa prin comanda unor motoare pas-cu-pas in modul Half-Step.
Robot autonom cu posibilitate de control prin DTMF 2012, absolvent Andrei Gherasim
Robotul este echipat cu senzori pentru detectarea obstacolelor si evolueaza autonom. La cerere, el trece in modul telecomandat, folosind un telefon GSM si decodarea de tonuri DTMF in timp real.
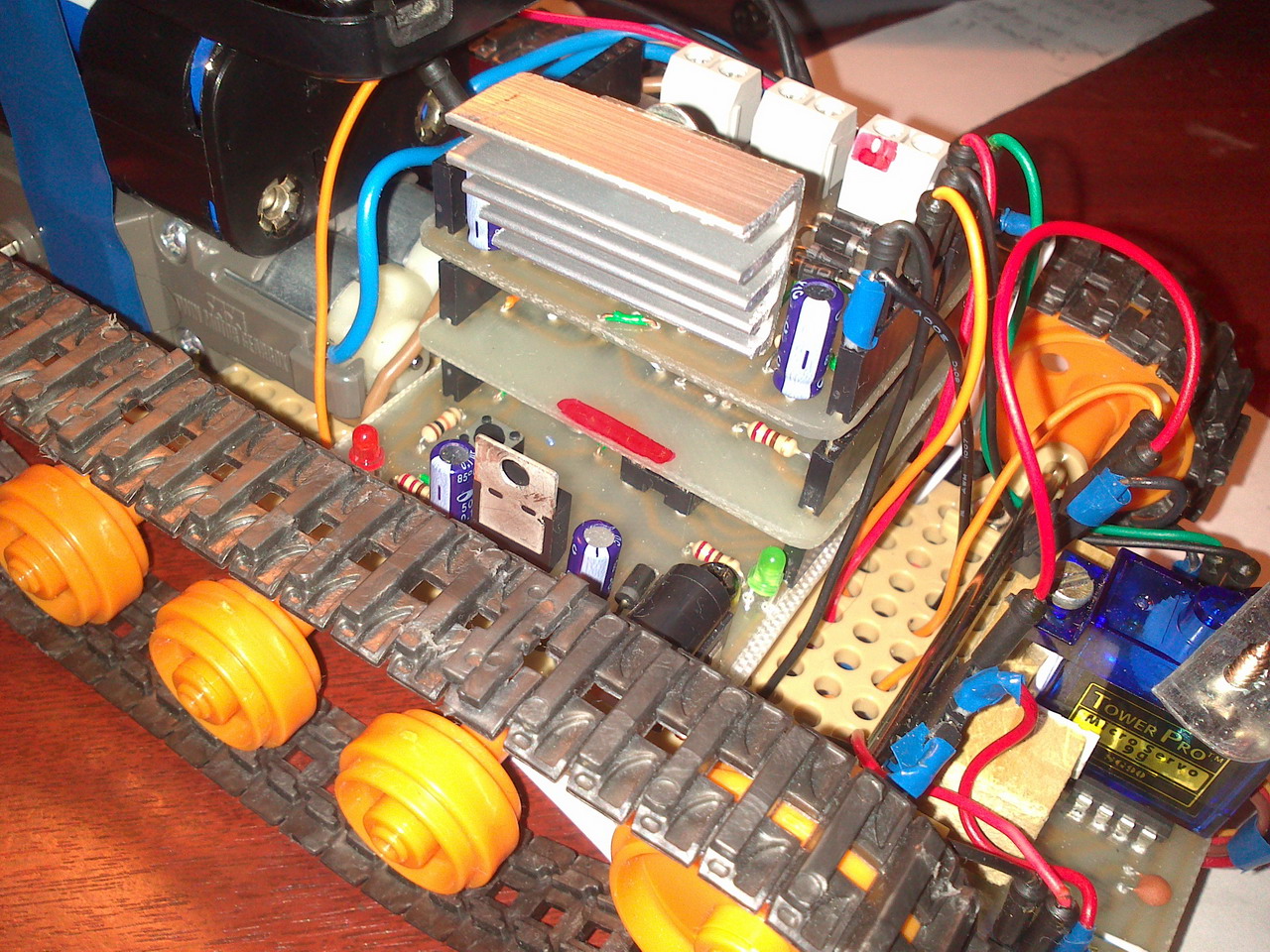
Balon meteorologic 2011, absolvent Andrei Diea (master)
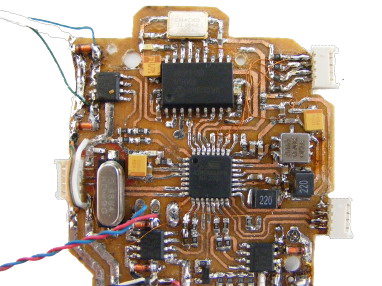
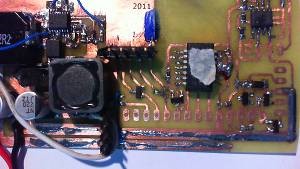





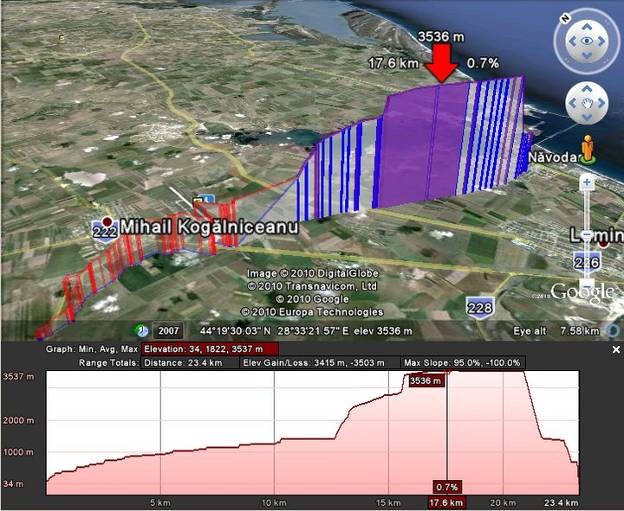
A fost construită partea electronică necesară pentru zborul unui balon meteorologic de 1.5mc umplut cu heliu: unitate de control cu uP AVR şi sistem de management al energiei. Acestea controlează şi alimentează un telefon GSM care transmite SMS-uri de localizare, un al doilea transmităţor proprietar pentru back-up, un receptor GPS şi un aparat foto. De asemenea se comandă un dispozitiv de desprindere şi o paraşută care asigură revenirea pe sol. Balonul a ajuns la 3500m şi a parcurs 23km pe orizonatlă, şi a fost recuperat cu succes din curtea unei biserici.
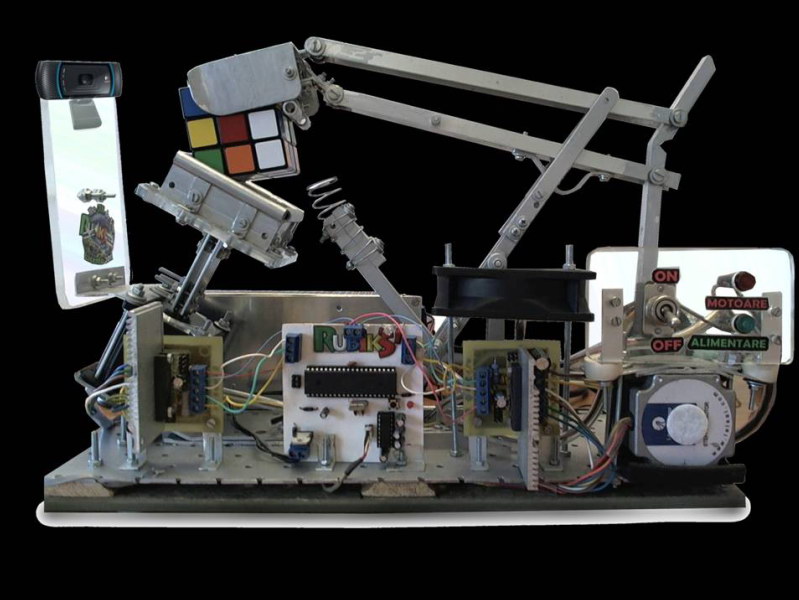
Robot Rubik 2011 - rezolva orice configuratie a cubului Rubik, absolvent Marinel Enache

Un film demonstrativ si Un alt film, complet
Robotul foloseste un webcam conectat la PC pe care a fost dezvoltata o aplicatie pentru scanarea cubului si determinarea pasilor necesari pentru rezolvare, care sint trimisi prin seriala sub forma de comenzi de rotire/schimbare a fetei catre un microcontroller Atmel care comanda 2 motoare. Intregul ansamblu electromecanic este realizat de la 0, din profile si tuburi de aluminiu.
Echipa de roboti cu comunicatie radio 2011, absolvent Vlad Brînzea
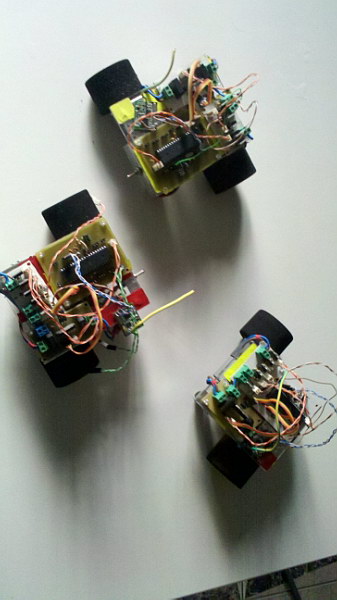


Au fost realizati 3 roboti identici, prevazuti cu senzori de culoare. Ei comunica prin module wireless si se distribuie pe o suprafata astfel incit fiecare sa gaseasca bucati de "hrana" de culori specifice.
Robot jucator de X si 0 2010, absolvent Dragos-Adrian Stroe
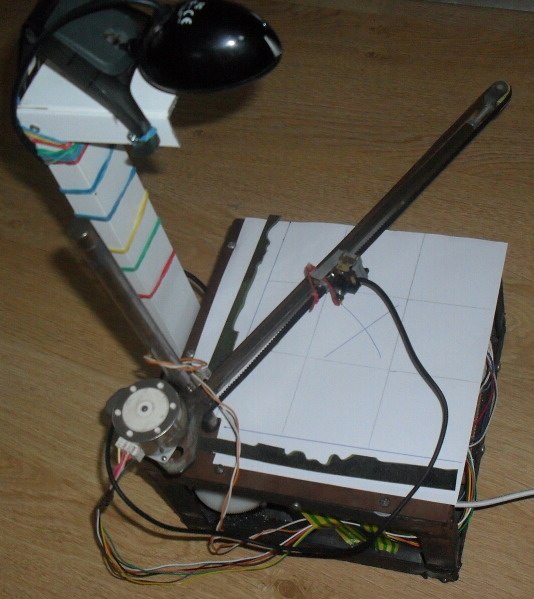

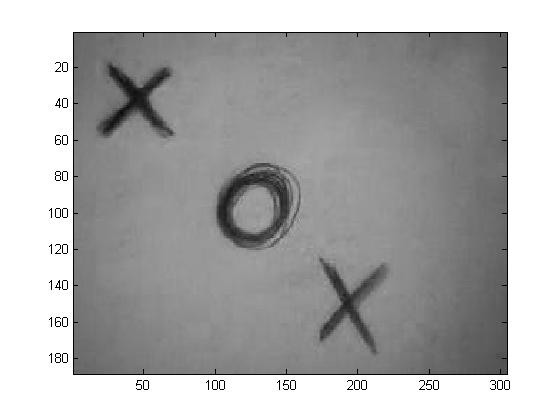
Robotul este capabil sa joace X si 0 pe hirtie cu un jucator uman (care foloseste un creion); recunoasterea miscarii omului se face cu o camera video. Robotul isi deseneaza propria miscare folosind un brat de tip plotter, controlat de un microcontroller AT Mega 16. Comenzile sint date de un PC care ruleaza un program in Java si comunica cu procesorul Atmel prin seriala.
Robot autonom biped 2009, absolvent Mircea Stoica
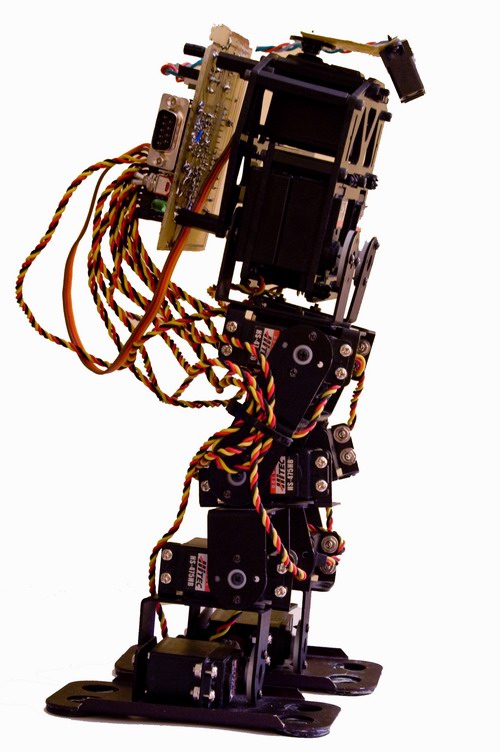
Robotul foloseste servomotoare in fiecare articulatie; controlul unghiurilor este asigurat de un procesor AT Mega 8. Robotul se poate deplasa in linie dreapta si poate face "pasi laterali" pentru a evita obstacolele detectate cu un senzor de distanta. Robotul e complet autonom, cu exceptia sursei de alimentare care e externa (din cauza greutatii).
Robot autonom/controlat prin internet 2009, absolvent Andrei Diea
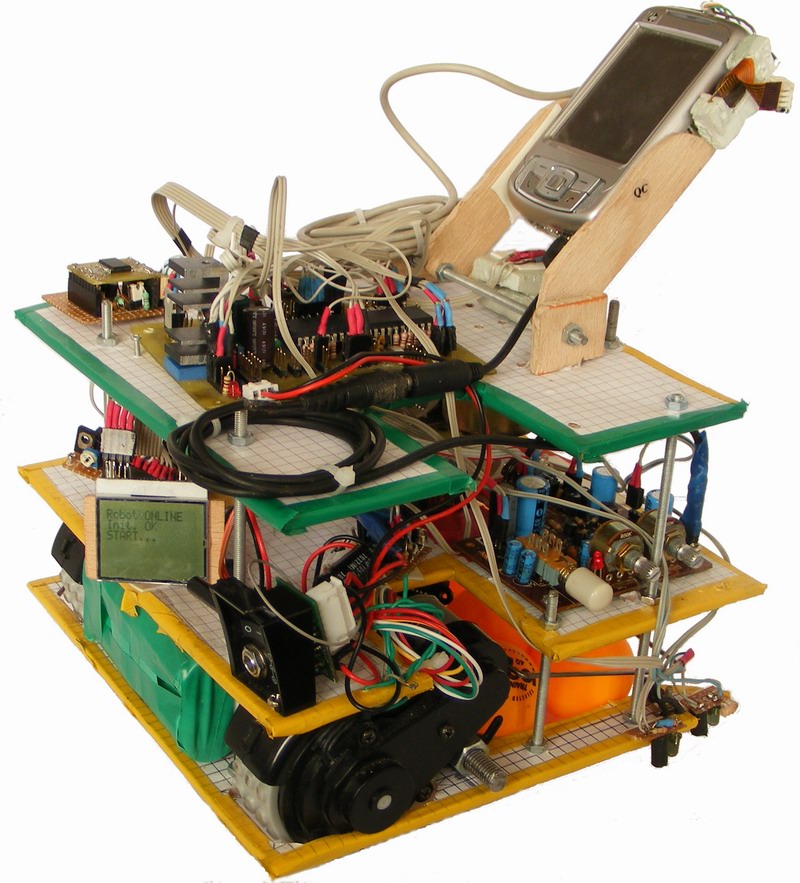
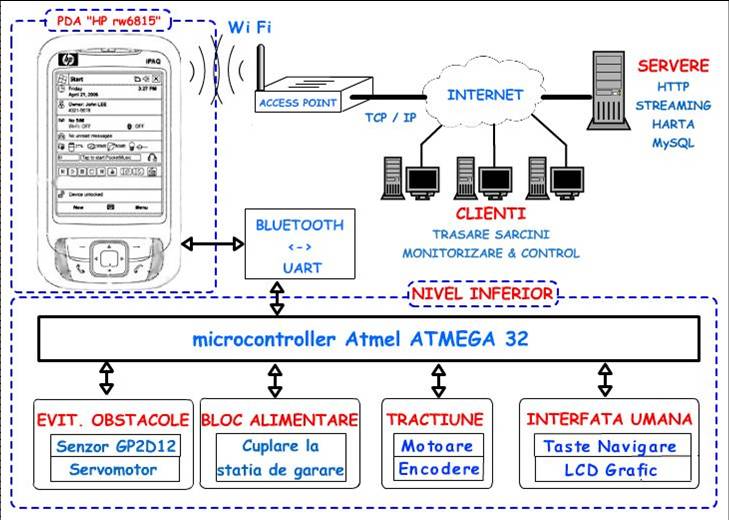

Robotul este contine o placă cu uC Atmel, care controlează motoarele si senzorii sint controlate si comunica prin seriala printr-un adaptor Bluetooth cu un PDA. Acesta are o camera video care permite recunoasterea unor imagini (pe baza unui soft scris special) cu zone colorate, pe care robotul le va evita sau, din contra, le va identifica. Este posibila functionarea atit in modul autonom, cit si controlul la distanta de catre unul sau mai multe PC-uri din internet, folosind interfata WiFi de pe PDA si un soft dezvoltat pe PC, care permite accesul la robot dintr-un browser de web.
Robot autonom 2009, absolvent George Cuculescu




Robotul exploreaza un spatiu si calculeaza pozitia curenta folosind informatiile de odometrie. El realizeaza o harta a obstacolelor intilnite si o transmite catre un PC, care o afiseaza cu ajutorul unui soft dezvoltat pentru aceasta aplicatie.
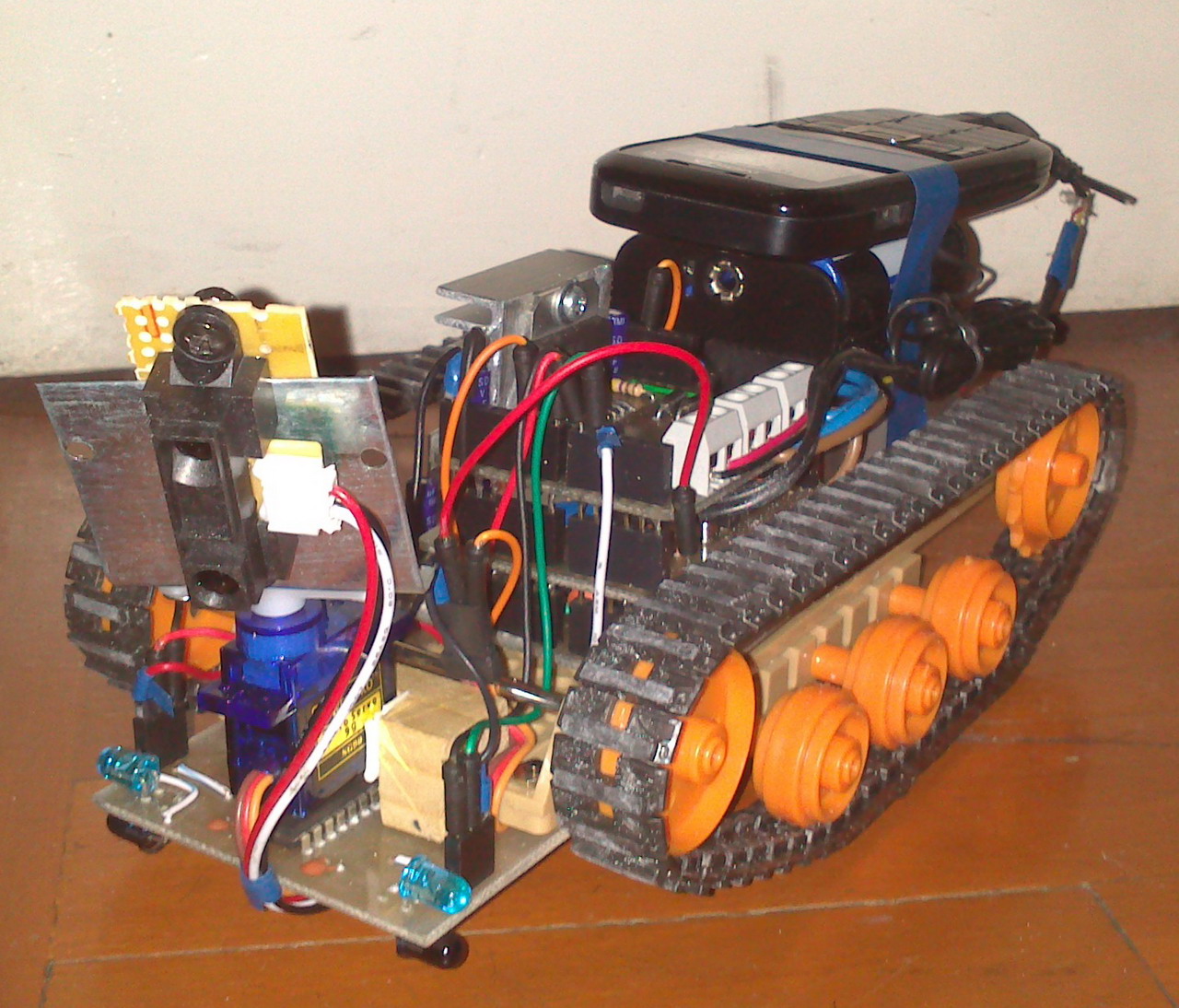
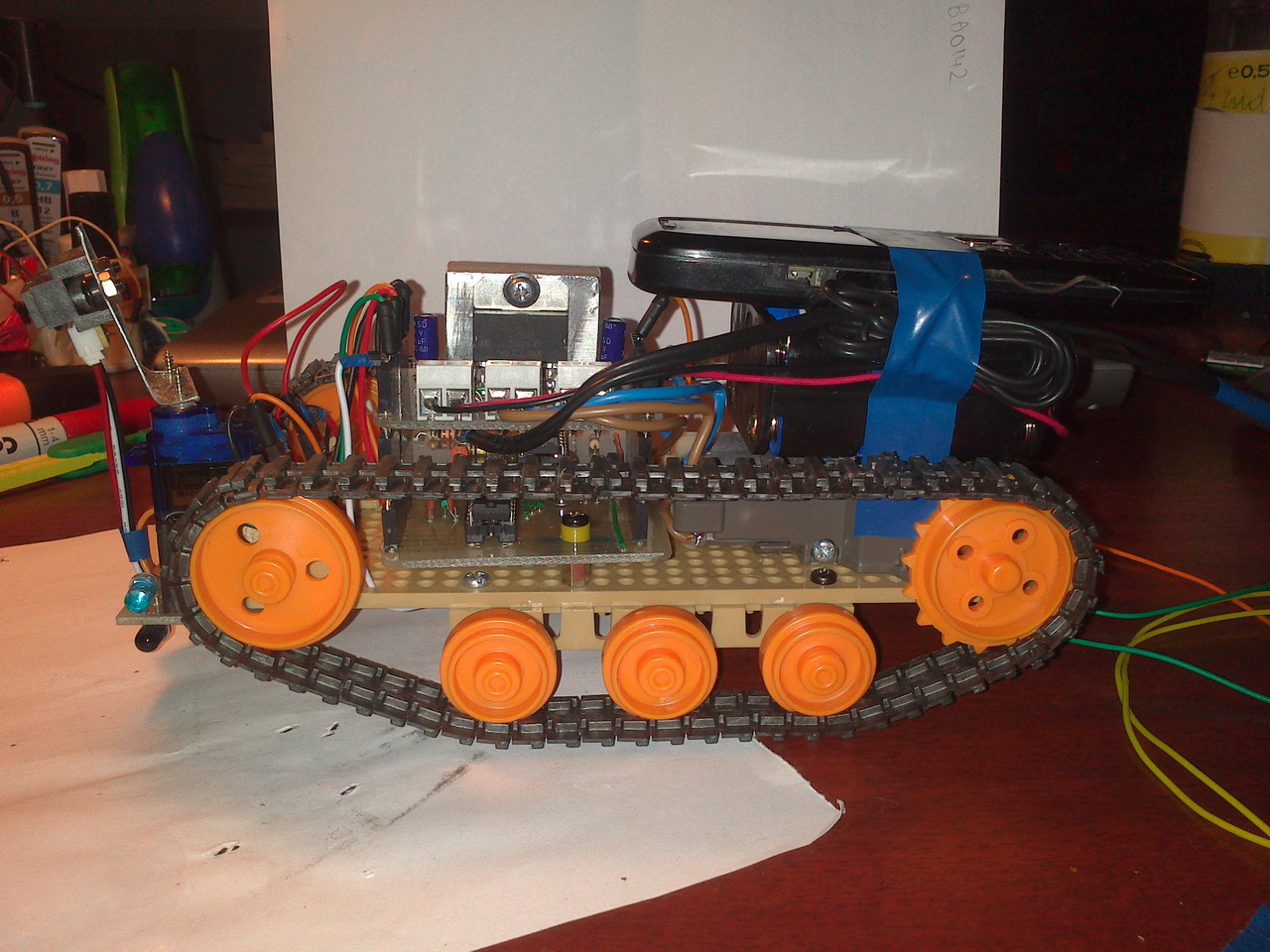
Robot cautator de mine 2009, absolvent Cosmin Filip
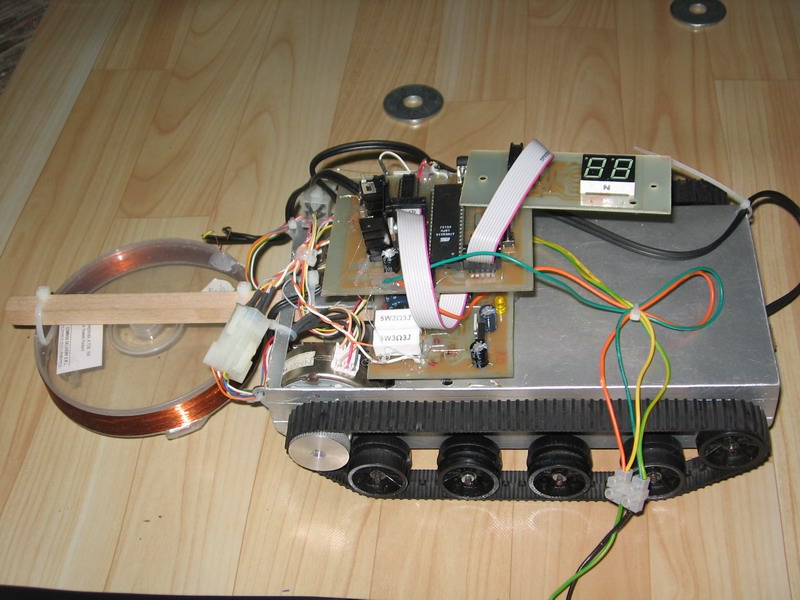
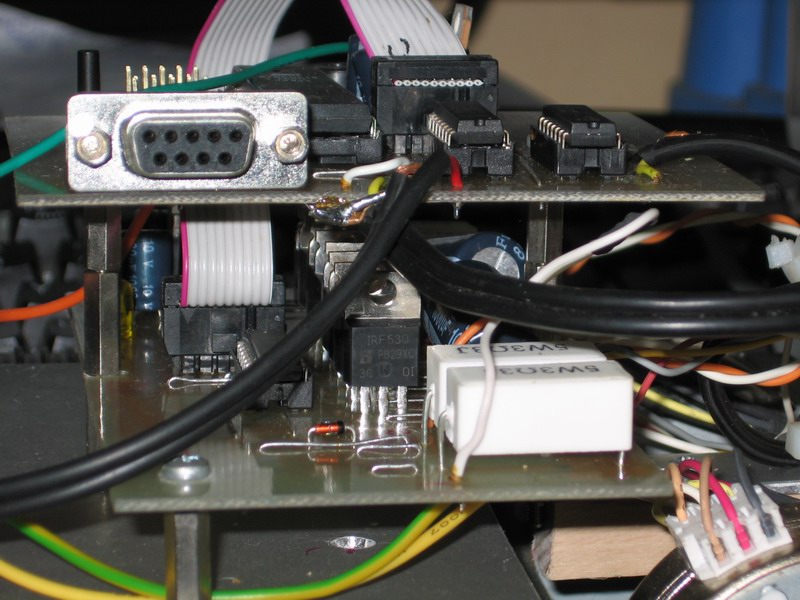
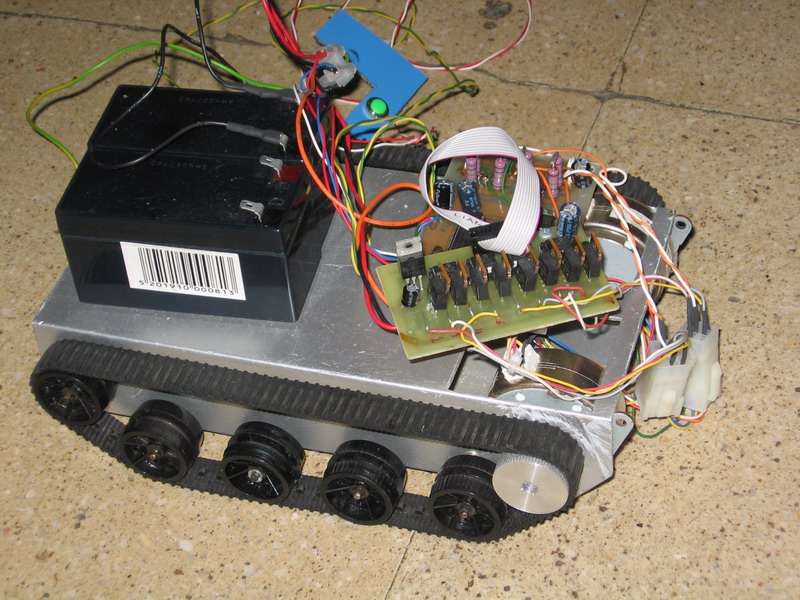

Robotul este construit dupa modelul unui tanc si este echipat cu un detector de obiecte metalice. Se specifica suprafata de lucru, pe care robotul o va parcurge, memorind si indicind numarul si pozitia "minelor" detectate.
Robot autonom 2008, absolvent Sorin Oancea

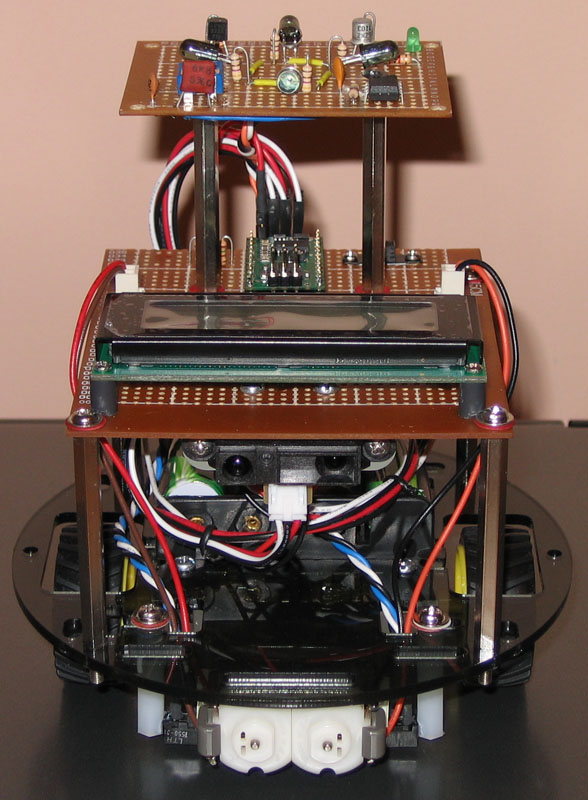
Robotul isi gaseste drumul intr-un labirint, folosind un senzor ultrasonic care detecteaza peretii. Se foloseste un microcontroller AT Mega 168. Exista si un modul care transimite datele la un PC, prin infrarosu, pentru telemetrie. Labirintul a fost fabricat din bucati de placaj si a avut dimensiunile de cca. 2x2 m.
Tetris dual-procesor folosind Chip-Card, 2008, absolvent Călin Bîră
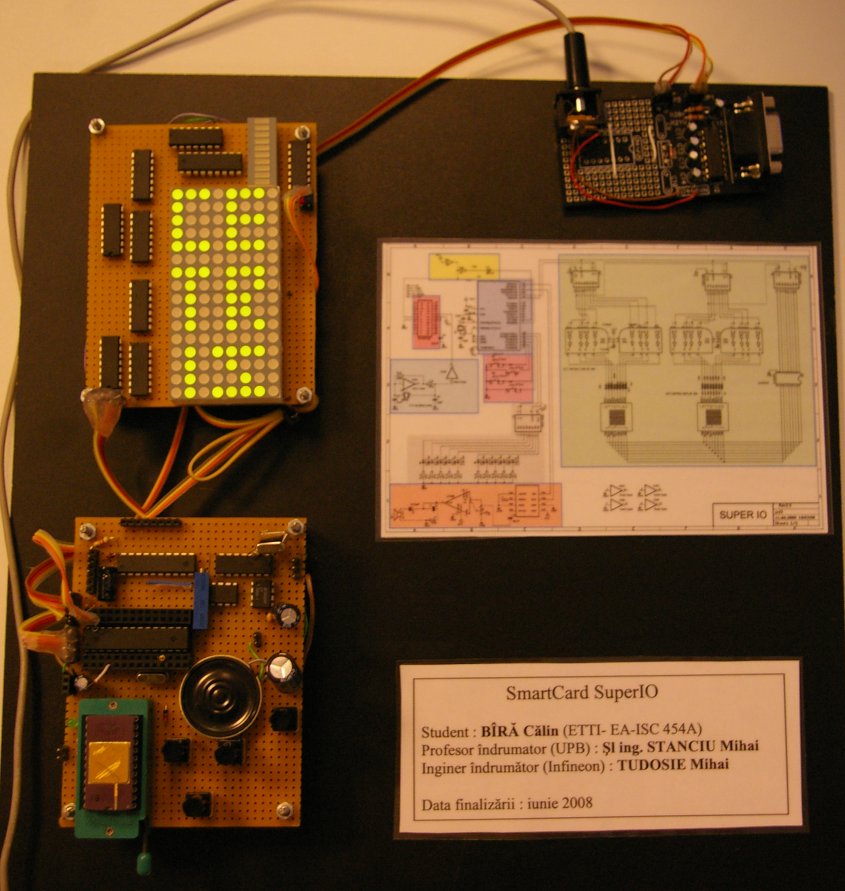
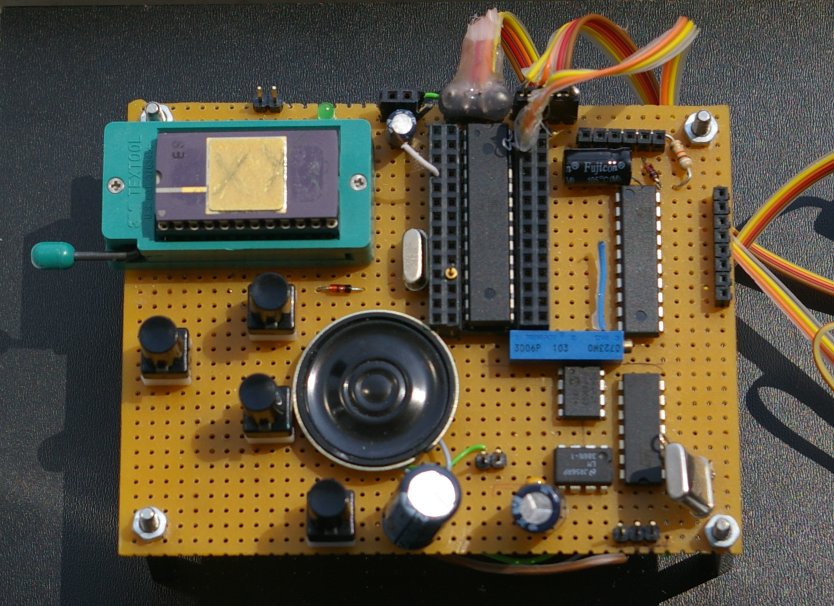
Scopul proiectului a fost folosirea unui procesor Infineon cu interfata de tip
chip-card, adica un singur pin de intrare/iesire + pini de alimentare.
S-a implementat un joc de Tetris integral
in acest procesor (master), toate perifericele (afisaj, sunet, tastatura) fiind
comandate multiplexat pe acelasi pin de I/O. S-a folosit un procesor aditional
(slave) Atmel pentru decodificarea protocolului de pe linia de I/O.
Robot autonom 2007, absolvent Ciprian Poenaru



Robotul se deplaseaza pe o suprafata si cauta monezi. In momentul in care gaseste una, o ia si o pune intr-un pahar. Se foloseste un procesor AT Mega 128. Pentru capturarea monezii s-a construit un brat cu un electromagnet la capat; bratul este ridicat si coborit folosind un mecanism de tip melc demontat dintr-un CD-ROM. Toti senzorii folositi sint de tip optic (perechi LED-fototranzistor). Ca sursa de alimentare se foloseste un acumulator de bormasina.
Robot hexapod 2007, absolvent Razvan Stanciu
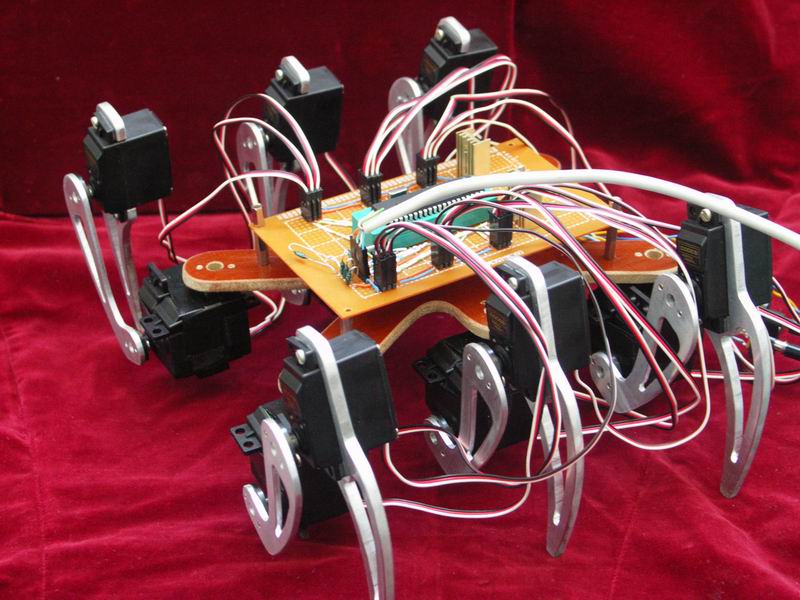
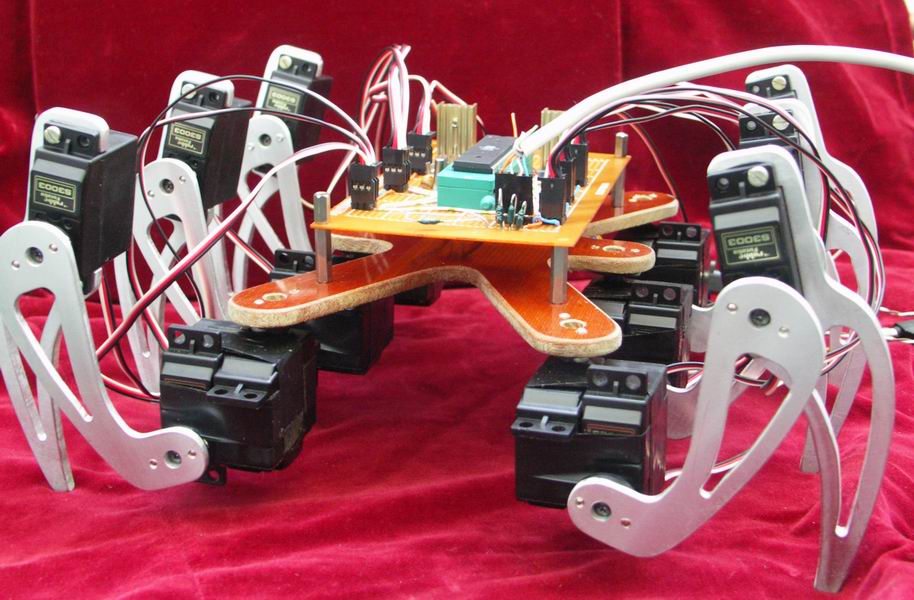

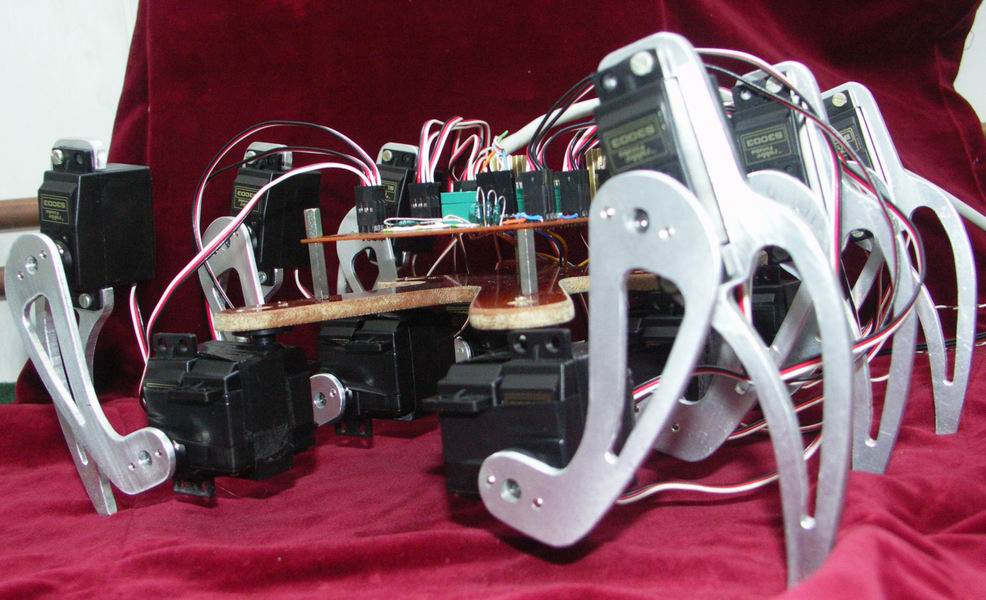
Robotul este realizat cu un procesor AT Mega 32 si contine 3 servomotoare per
picior (total 18 motoare; pentru un hexapod, solutia nu este optima din pdv al
costului, dar s-a
dorit experimentarea comandarii a cit mai multe elemente de actionare folosind
un singur procesor). Servomotoarele sint de tipul folosit in modele reduse
si se plaseaza (si mentin) pe o anumita pozitie (intre 0 si 180 grade) in
functie de latimea impulsului de comanda. Aceasta este determinata precis
de catre timerele procesorului.
Robotul este capabil sa se deplaseze inainte, inapoi, in lateral si sa vireze.
Datorita consumului ridicat, robotul nu este autonom, ci se alimenteaza
de la o sursa separata.
Robot autonom Lego 2007, absolvent Răzvan Horeangă
S-a pornit de la un kit Lego Mindstorms NXT si s-a urmarit realizarea unui robot folosind piesele de Lego (inclusiv motoarele), dar nu si modulul de comanda inclus in kit. S-a dezvoltat propriul modul de comanda folosind un procesor AT Mega 8 si drivere de motor L293. Robotul este de tip line-follower.
Robot autonom 2006, absolvent Florin Cazan

Robotul evolueaza singur pe o suprafata, evitind obstacolele si caderea in gol, si poate sa vina la chemare, localizind sursa zgomotelor. Se foloseste un procesor AT Mega 128. De asemenea, el detecteaza descarcarea bateriei si in acest caz incepe cautarea incarcatorului, care are o baliza IR. El se va indrepta spre incarcator si se va "lipi" de acesta prin intermediul a 2 contacte elastice. Pentru localizarea directiei din care vin sunetele, se folosesc 3 microfoane si un algoritm de determinare a pozitiei in spatiu.
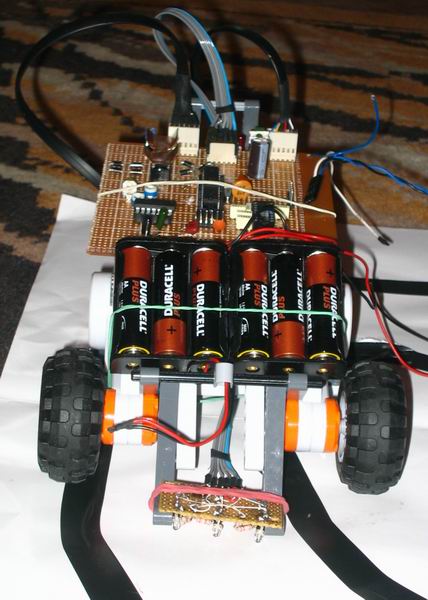
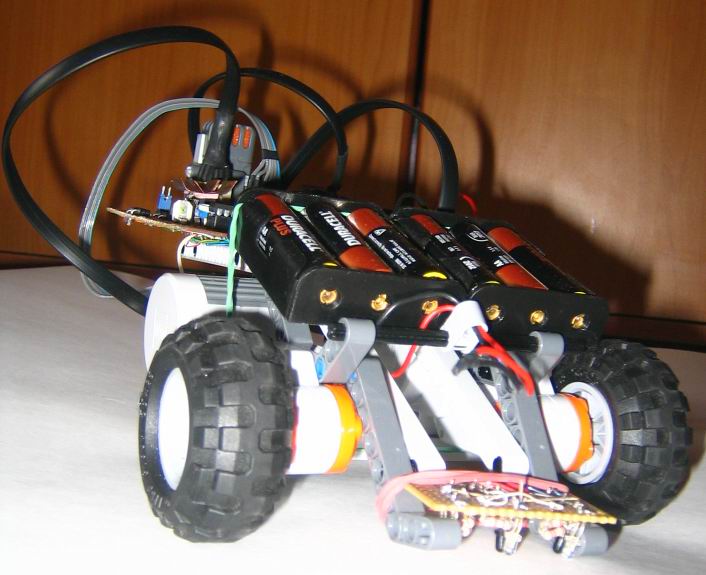
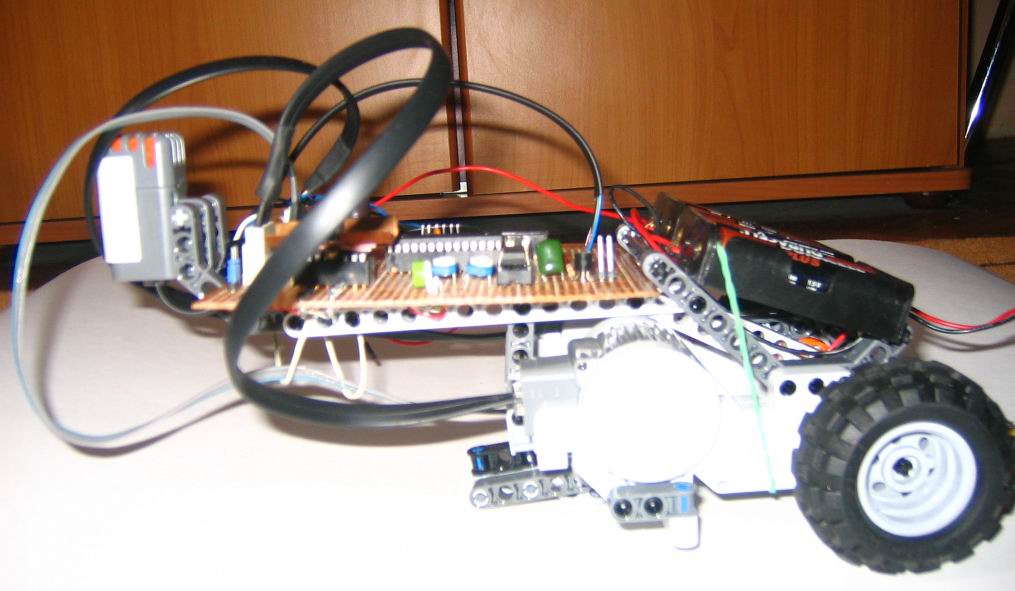
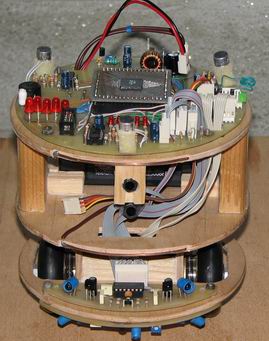
Robot autonom 2005, absolventi Madalin Chirita si Mircea Tranca
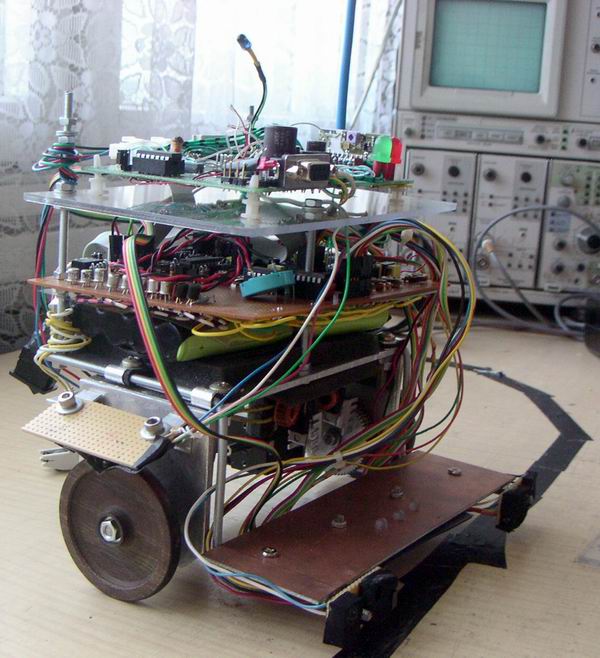


Robotul poate urmari singur un traseu negru oarecare pe o suprafata alba si evita obstacolele de pe traseu.
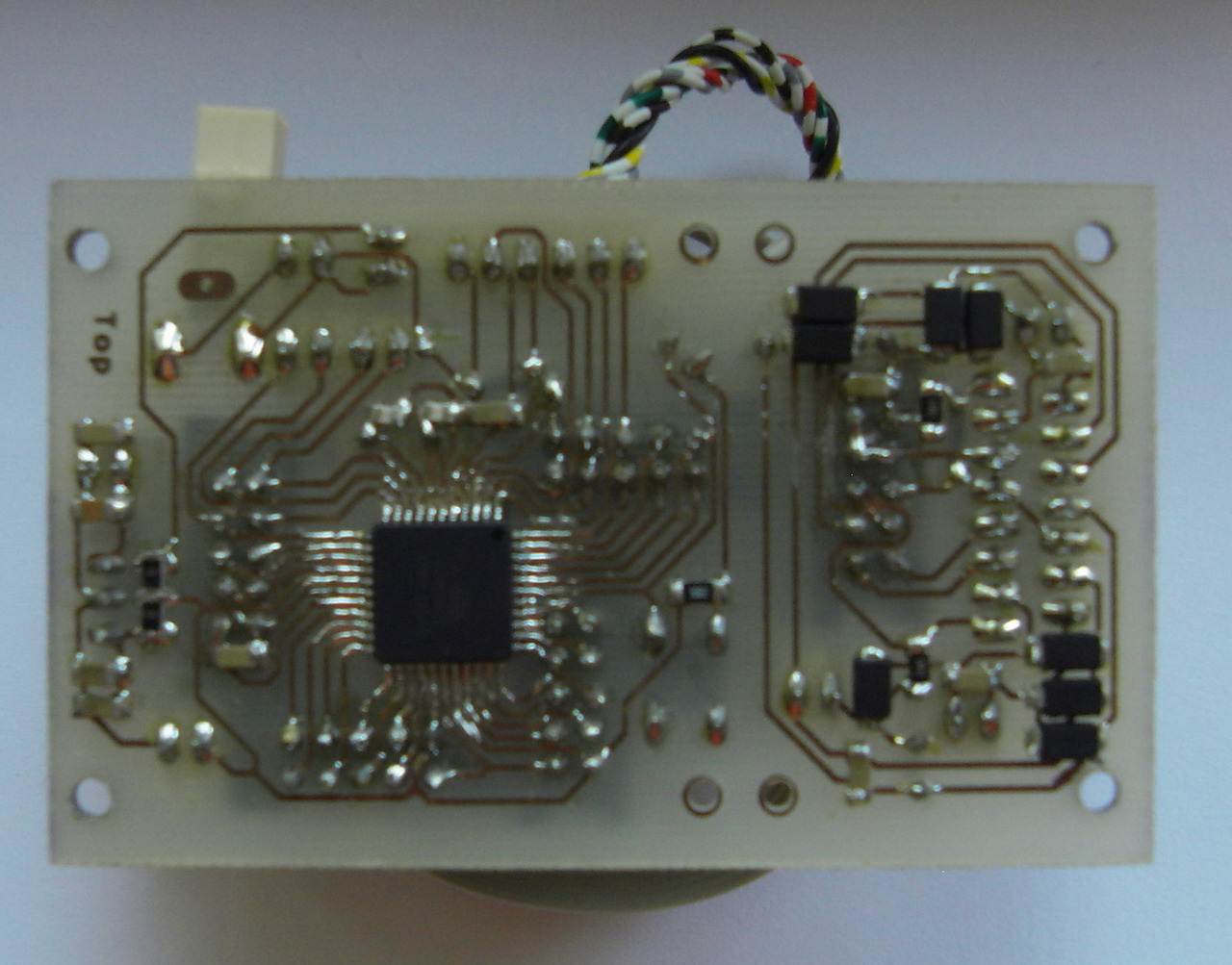
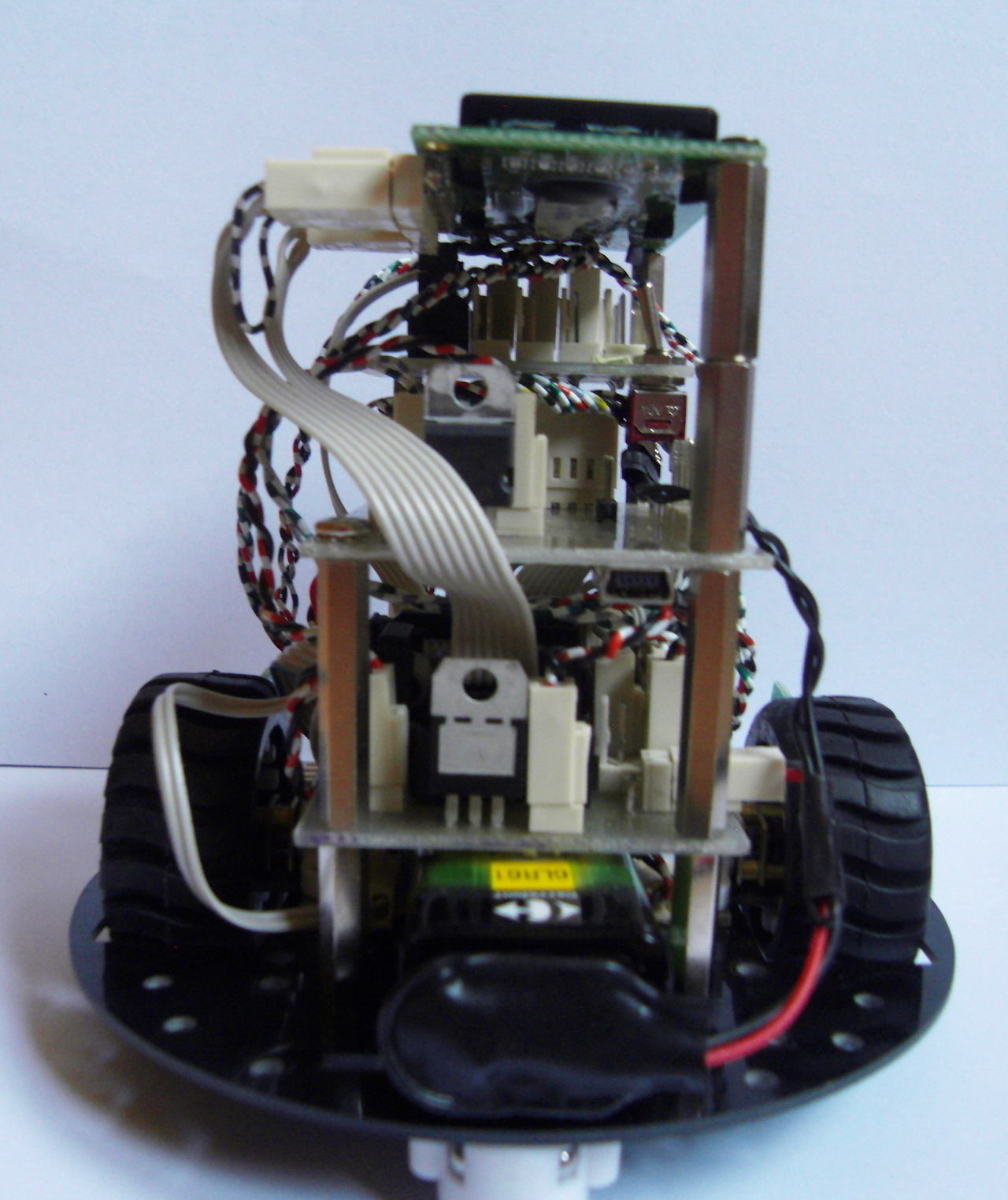
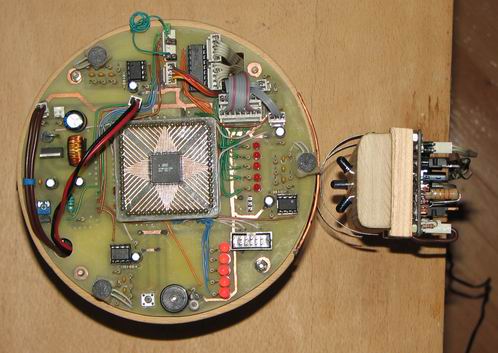
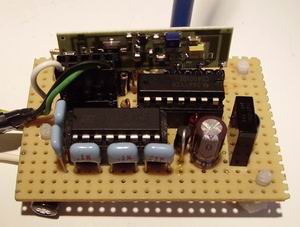
Se foloseste un microcontroller AT Mega 128. In afara de placa logica, mai exista o placa pentru
citirea senzorilor precum si o placa pentru comanda motoarelor. Cele 3 placi formeaza o structura sandwich care reprezinta si corpul robotului; nu exista carcasa exterioara.
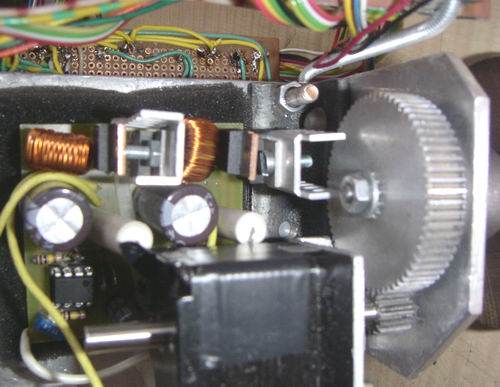
Se folosesc 2 motoare pas cu pas cu moment mare si o sursa in comutatie. Bateriile sint acumulatoare Ni-Mh de uz general, format R6 (AA).
Urmarirea liniei se face masurind cantitatea de lumina reflectata folosind 3 perechi led-fotodioda plasate pe un mic "plug" din fata robotului. Masurarea se face de catre 3 canale analog/numerice disponibile pe procesorul AVR, cu un minim de componente externe si interpretarea se face in program. Detectia obstacolelor se face tot optic, prin perechi led-fotodioda plasate in colturi.
La detectarea unui obstacol pe directia inainte, robotul incepe o procedura de ocolire a acestuia, astfel ca e nevoie doar de 2 perechi optice (in fata si pe una din laterale). La depasirea obstacolului, robotul revine la urmarirea liniei.
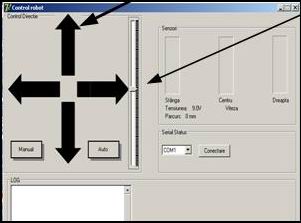
Robotul se afla in legatura fara fir cu un PC folosind o interfata construita in acest scop si care se conecteaza la un port serial. Sensul uplink (calculator-robot) este realizat prin radio in banda libera de 433.92MHz; pe acest sens PC-ul poate trimite comenzi de intrare in modul autonom (urmarirea liniei) sau modul manual (deplasare comandata de apasarea unor sageti pe ecranul de comanda al unui program special realizat in acest scop in Borland Delphi). Sensul downlink (robot-calculator) este realizat optic, folosind un LED IR pentru telecomenzi TV. Nu s-a folosit tot radio pentru a putea functiona duplex (emisia simultana cu receptia) cu costuri mici. Pe acest sens se transmit date de telemetrie: distanta parcursa, starea senzorilor, tensiunea bateriei si altele.
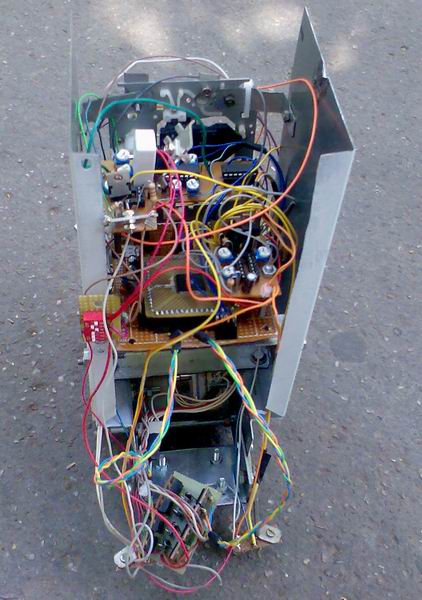
Macheta plotter 2005, absolvent Cristian Negulescu

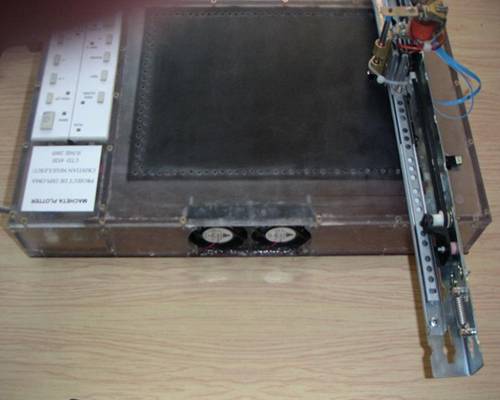

S-a urmarit realizarea hard+soft a unui plotter complet functional, capabil de a fi conectat la PC.
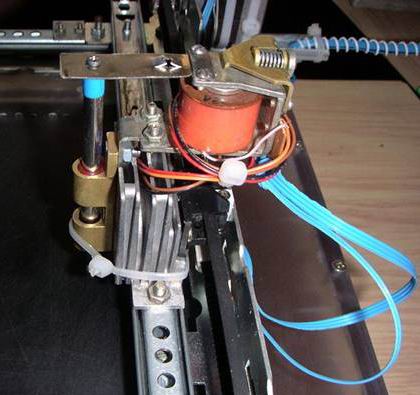
Plotterul contine o placa logica bazata pe microcontroller AT Mega 128 precum si placi pentru comanda elementelor de putere si sursele de alimentare.
Se folosesc 2 motoare pas cu pas de 24V recuperate din imprimante cu ace vechi, precum si curelele dintate ale acestora. De altfel, aproape toate elementele mecanice sint obtinute din recuperari. Capul plotterului este realizat prin modificare unui releu; lamela releului in loc sa inchida un contact deplaseaza in jos (spre hirtie) o mina de pix PARKER :-). Hirtia este mentinuta fix pe suprafata plotterului prin aspiratie cu 2 ventilatoare de PC. Desenarea si deplasarea capului in coordonate x-y pot fi comandate manual prin intermediul unui panou de comanda.
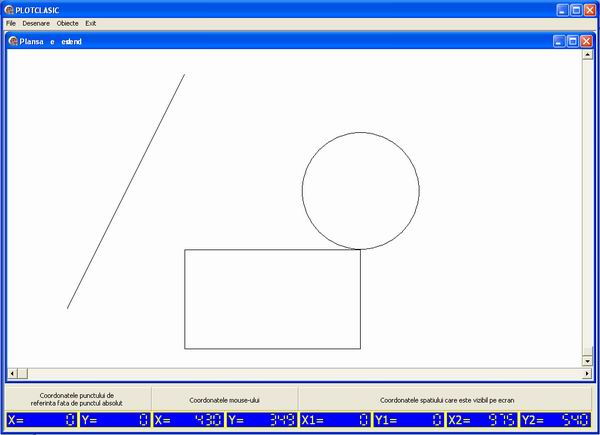
S-au conceput 2 programe de PC (in Borland Delphi) pentru transmiterea unui desen de la PC la plotter: Un program pentru desenarea (gen Microsoft Paint) a unei imagini vectoriale din linii, cercuri etc., care vor fi trimise imediat sub forma de comenzi catre plotter, si un program pentru "scanarea" unei imagini alb-negru si generarea de comenzi pentru desenarea sa cit mai eficienta, minimizind deplasarea si ridicarea/coborirea capului.
Observatii: